一种六自由度风洞试验模型姿态控制装置的制作方法
1.本发明属于高超声速风洞试验技术领域,具体涉及一种六自由度风洞试验模型姿态控制装置。
背景技术:
2.进行高超声速风洞试验时,风洞试验模型需要在风洞流场稳定后被平稳投送到试验气流中,并在气流中保持特定的姿态,以获得相应姿态的试验结果;作为支撑试验模型并对风洞试验模型进行姿态调整的机械平台,模型姿态控制装置是风洞系统的重要组成部分之一;在安装环境方面,为了防止风洞运行的震动传递到模型姿态控制装置以及风洞试验模型上,需要采取措施隔离风洞震动,并且满足试验段真空密封要求;在结构刚性方面,由于需要承受气动载荷冲击及模型安装人员的人为冲击,并保证整体装置长期稳定,模型姿态控制装置需具有足够刚性并且避免薄弱环节——导轨滑块及丝杠螺母的不恰当承载;在运动自由度方面,模型姿态控制装置需要将风洞试验模型从流场区域外送入流场区域内,并且适应不同尺寸的风洞试验模型在流场中的定位需求,因此需要模型姿态控制装置具备沿重力方向(y向)、沿气流方向(x向)及垂直于xy平面的侧向(z向)的线位移自由度;另外,在试验进行时,需要调整风洞试验模型的俯仰(α向)、偏航(β向)及滚转(γ向)姿态角以获得相应姿态的气动试验结果;因此,模型姿态控制装置需要具备相应的角位移自由度;在运动控制方面,为了使机构的伺服电机与各自由度一一对应,避免伺服电机耦合控制导致的运动学解算工作,需要合理布局各个自由度机械结构;当前,有必要发展一种新型的六自由度风洞试验模型姿态控制装置。
技术实现要素:
3.本发明所要解决的技术问题是提供及一种六自由度风洞试验模型姿态控制装置;本发明的六自由度风洞试验模型姿态控制装置,其特点是,所述的六自由度风洞试验模型姿态控制装置位于试验段内,通过隔震支柱组件固定在隔震地基上;所述的六自由度风洞试验模型姿态控制装置包括从下至上、金字塔型分布的x向运动组件、z向运动组件、β向旋转组件、y向运动组件、α向旋转组件和γ向旋转组件;γ向旋转组件的中心轴线上安装有支杆,支杆的前端安装有面向风洞来流的试验模型;所述的隔震支柱组件包括支撑柱及隔震密封波纹管;支撑柱下端固定在隔震地基上,上端通过x向运动组件的支撑柱安装法兰与x向运动组件的x向基座连接;隔震密封波纹管套装在支撑柱上,隔震密封波纹管的下端焊接在支撑柱周围,上端通过法兰连接在试验段壳体的下表面。
4.进一步地,所述的x向运动组件包括:x向基座、x向直线导轨滑块机构、支撑柱安装法兰、x向丝杠法兰螺母组合件、x向伺服电机和x向法兰;所述的x向基座为矩形平板,上表面设置有上安装面,下表面设置有下安装面;
所述的上安装面上设置有x向直线导轨滑块机构、x向丝杠法兰螺母组合件、x向伺服电机;x向丝杠法兰螺母组合件具有丝杠螺母运动副,x向丝杠位于x向基座的中心轴线上,与x向丝杠配装的x向螺母上设置有x向法兰,z向运动组件具有与x向法兰对应的x向法兰环,x向法兰环装卡在x向法兰上;x向直线导轨滑块机构的导轨对称安装在x向丝杠的两侧、导轨上装卡有若干滑块,z向运动组件具有与滑块一一对应的x组件安装法兰,x组件安装法兰装卡在对应的滑块上;所述的下安装面上设置有与支撑柱对应的支撑柱安装法兰,支撑柱安装法兰与支撑柱固定连接;所述的x向伺服电机驱动x向丝杠转动,x向螺母沿x向丝杠移动,通过x向法兰和x向直线导轨滑块机构的滑块带动z向基座沿x向运动,实现六自由度风洞试验模型姿态控制装置带动试验模型沿x向运动。
5.进一步地,所述的z向运动组件包括z向基座、z向直线导轨滑块机构、x组件安装法兰、z向丝杠法兰螺母组合件、z向伺服电机、β向基座固定块和x向法兰环;所述的z向基座为矩形平板,上表面设置有上安装面,下表面设置有下安装面;所述的上安装面上设置有z向直线导轨滑块机构、z向丝杠法兰螺母组合件和z向伺服电机;z向丝杠法兰螺母组合件具有丝杠螺母运动副,z向丝杠与x向丝杠垂直,位于z向基座的一个侧边,与z向丝杠配装的z向螺母上设置有β向基座固定块,β向基座固定块与β向运动组件的β向下基座的侧壁固定连接;z向直线导轨滑块机构有2组,每组z向直线导轨滑块机构的导轨均平行于z向丝杠,一根导轨和z向丝杠位于z向基座的同一个侧边,另一根导轨位于z向基座的对面侧边;z向直线导轨滑块机构的导轨上装卡有若干滑块,β向运动组件的β向下基座的下表面设置有与滑块一一对应的z组件安装法兰,z组件安装法兰装卡在对应的滑块上;所述的下安装面上设置有与x向直线导轨滑块机构的x向滑块对应的x组件安装法兰,x组件安装法兰装卡在x向直线导轨滑块机构的x向滑块上;还设置有与x向法兰对应的x向法兰环,x向法兰环装卡在x向法兰上;所述的z向伺服电机驱动z向丝杠转动,z向螺母沿丝杠移动,通过β向基座固定块和z向直线导轨滑块机构的滑块带动β向运动组件的β向下基座沿z向运动,实现六自由度风洞试验模型姿态控制装置带动试验模型沿z向运动。
6.进一步地,所述的β向旋转组件包括β向下基座、β向上基座、β向圆弧导轨滑块机构、z组件安装法兰、滑块固定螺孔、β向圆弧齿轮齿条机构、y组件安装定位法兰、β向伺服电机和中轴;所述的β向旋转组件为矩形块结构,分为上、中、下三层,上层为β向上基座,中层为β向圆弧导轨滑块机构,下层为β向下基座,上、中、下三层的中心贯穿有中轴,中轴与β向下基座中心位置安装的轴承座配装;y向运动组件的定位法兰孔套装在中轴上,并通过y组件安装定位法兰实现共轴定位与固定;所述的β向圆弧导轨滑块机构的圆弧导轨安装在β向下基座的上安装面上,β向圆弧齿轮齿条机构的圆弧齿条也安装在β向下基座的上安装面上,圆弧导轨的半径小于圆弧齿条的半径,两者的圆心均与中轴共轴;β向圆弧导轨滑块机构的滑块通过滑块固定螺孔固定在β向上基座的下安装面上,滑块装卡在β向圆弧导轨滑块机构的圆弧导轨上;β向伺服电
机安装β向上基座上,β向伺服电机的输出轴连接β向圆弧齿轮齿条机构的齿轮,齿轮啮合β向圆弧齿轮齿条机构的齿条;z组件安装法兰安装在β向下基座的下安装面上,z组件安装法兰装卡在z向直线导轨滑块机构的滑块上;β向基座固定块通过螺母固定在β向下基座的侧安装面;所述的β向伺服电机启动,β向圆弧齿轮齿条机构的齿轮啮合齿条,带动β向伺服电机沿齿条转动,β向圆弧导轨滑块机构的滑块沿圆弧导轨滑动,β向上基座绕中轴转动,实现六自由度风洞试验模型姿态控制装置带动试验模型改变偏航角β。
7.进一步地,所述的y向运动组件包括y向u形框架基座、y向导轨滑块机构、y向丝杠法兰螺母组合件、y向伺服电机、配重块、钢丝吊绳、配重块导向杆和定位法兰孔;所述的y向u形框架基座的底部中心设有定位法兰孔,通过y组件安装定位法兰套装在中轴上并固定;y向u形框架基座两侧的竖直的塔形基座位于x向运动组件的x向基座中心轴线的两侧,一侧塔形基座为主动侧,另一侧塔形基座为从动侧,主动侧和从动侧的相对的侧面为内侧壁面,背离的侧面为外侧壁面;主动侧的内侧壁面设置有两组y向导轨滑块机构,从动侧的内侧壁面设置有对应的另外两组y向导轨滑块机构,y向导轨滑块机构的导轨位于竖直方向,4根导轨上分别装卡有若干相互对应的滑块,滑块通过螺栓与α向旋转组件的α向旋转基座上设置的对应螺孔连接;α向旋转基座的底部通过吊环固定有4根钢丝吊绳,4根钢丝吊绳分别通过塔形基座顶端的4个滑轮引出至塔形基座的外侧壁面,并分别与各自的配重块连接;外侧壁面还安装有对配重块进行上下运动导向的配重块导向杆;主动侧的中心轴线上安装有y向丝杠法兰螺母组合件,y向丝杠位于主动侧的中心轴线上,y向丝杠配装的y向螺母通过法兰与α向旋转基座侧壁面连接;所述的y向伺服电机驱动y向丝杠正向转动,y向螺母通过法兰带动α向旋转基座向上移动,滑块沿导轨向上移动,同时配重块沿配重块导向杆向下运动,实现六自由度风洞试验模型姿态控制装置带动试验模型沿y向向上移动;y向伺服电机驱动y向丝杠反向转动,实现六自由度风洞试验模型姿态控制装置带动试验模型沿y向向下移动。
8.进一步地,所述的α向旋转组件包括α向旋转基座、α向圆弧导轨滑块机构、α向圆弧齿轮齿条机构、α向伺服电机、α向旋转平台和模型支撑弯臂;所述的α向旋转基座通过侧面的螺孔与y向运动组件的y向导轨滑块机构的滑块固连;α向旋转基座通过法兰与y向丝杠法兰螺母组合件的螺母固连;α向旋转基座通过四条钢丝吊绳分别与四组配重块分别相连;α向旋转基座上设置有α向圆弧导轨滑块机构和α向圆弧齿轮齿条机构,α向圆弧导轨滑块机构的圆弧导轨与α向圆弧齿轮齿条机构的圆弧齿条并列排列;圆弧导轨上装卡有滑块,α向旋转平台通过螺孔与滑块固定连接;α向旋转平台上安装有α向伺服电机,α向伺服电机的输出轴与α向圆弧齿轮齿条机构的齿轮固定连接,齿轮啮合圆弧齿条;模型支撑弯臂的下端固定在α向旋转平台上,模型支撑弯臂的上端与γ向运动组件的γ向基座固定连接;所述的α向伺服电机启动,α向圆弧齿轮齿条机构的齿轮啮合圆弧齿条,带动α向伺服电机沿齿条转动,α向圆弧导轨滑块机构的滑块沿圆弧导轨滑动,α向旋转平台及模型支撑弯臂作圆弧运动,实现六自由度风洞试验模型姿态控制装置带动试验模型改变俯仰角α。
9.进一步地,所述的γ向旋转组件包括γ向基座、γ向旋转输出轴和γ向伺服电机;所述的γ向基座安装在α向旋转组件的模型支撑弯臂的上端,γ向伺服电机安装
在γ向基座内腔,γ向伺服电机的输出轴与γ向输出轴固定连接;所述的γ向伺服电机启动,带动γ向输出轴沿γ向基座的中心轴线旋转,实现六自由度风洞试验模型姿态控制装置带动试验模型改变滚转角γ。
10.进一步地,所述的β向圆弧齿轮齿条机构的圆弧齿条采用圆柱状齿轮牙。
11.进一步地,所述的α向圆弧齿轮齿条机构的圆弧齿条采用圆柱状齿轮牙。
12.本发明的六自由度风洞试验模型姿态控制装置能够为风洞试验模型提供六个自由度的运动;通过x向运动组件实现模型的运动;通过y向运动组件实现模型的上下运动;通过z向运动组件实现模型左右运动;通过α向旋转组件实现模型俯仰角α变化;通过β向旋转组件实现模型偏航角β变化;通过γ向旋转组件实现模型滚转角γ变化;六个运动组件由下至上按照x向运动组件、z向运动组件、β向旋转组件、y向运动组件、α向旋转组件以及γ向旋转组件依次布局,保证了各个自由度的运动关系满足国标规范,避免了各运动自由度相互耦合,简化了控制程序,提高了可靠性。
13.本发明的六自由度风洞试验模型姿态控制装置中的x向运动组件、z向运动组件、β向旋转组件、y向运动组件、α向旋转组件以及γ向旋转组件采用左右对称布局、对称支撑,整个机械结构的支撑点呈现金字塔状分布,保证了整个机械结构的刚性及长期稳定性。
14.本发明的六自由度风洞试验模型姿态控制装置采用具有隔震密封波纹管的支撑柱,保证了整个机械结构不受风洞本体的震动影响,并且不破坏风洞本体的密封性。
15.本发明的六自由度风洞试验模型姿态控制装置采用圆柱状齿轮牙的齿轮齿条实现α向及β向旋转自由度的驱动,较涡轮蜗杆传动方式提高了传动效率,减少了啮合间隙,提高了整个机械结构的运动精度。
16.本发明的六自由度风洞试验模型姿态控制装置中的α向旋转基座通过吊环与钢丝吊绳连接,并通过滑轮与y向配重块构成配重体系,降低了α向旋转组件及γ向旋转组件的重量对α向圆弧导轨滑块的载荷,有利于提高α向圆弧导轨滑块机构的滑块寿命,保证整个机械结构的运动精度。
17.本发明的六自由度风洞试验模型姿态控制装置采用六自由度单独运动驱动方式,结构稳定、运动精度高、维修保养便捷。
附图说明
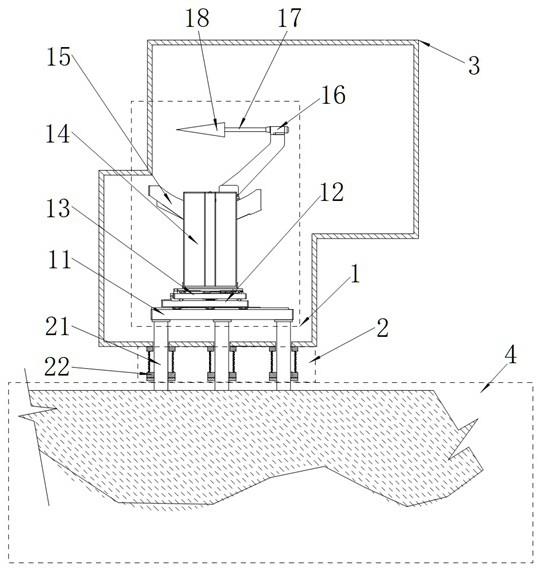
18.图1为本发明的六自由度风洞试验模型姿态控制装置的总体布局图(侧视图);图2为本发明的六自由度风洞试验模型姿态控制装置中的x向运动组件的结构示意图(俯视图);图3为本发明的六自由度风洞试验模型姿态控制装置中的z向运动组件的结构示意图(俯视图);图4a为本发明的六自由度风洞试验模型姿态控制装置中的β向运动组件的结构示意图(俯视图);图4b为本发明的六自由度风洞试验模型姿态控制装置中的β向运动组件的结构示意图(侧视图);图5a为本发明的六自由度风洞试验模型姿态控制装置中的y向运动组件的结构示意图(正视图);
图5b为本发明的六自由度风洞试验模型姿态控制装置中的y向运动组件的结构示意图(侧视图);图6a为本发明的六自由度风洞试验模型姿态控制装置中的α向运动组件的结构示意图(正视图);图6b为本发明的六自由度风洞试验模型姿态控制装置中的α向运动组件的结构示意图(俯视图);图6c为本发明的六自由度风洞试验模型姿态控制装置中的α向运动组件的结构示意图(侧视图);图7为本发明的六自由度风洞试验模型姿态控制装置中的γ向运动组件的结构示意图(剖面图)。
19.图中,1.六自由度风洞试验模型姿态控制装置;2.隔震支柱组件;3.试验段;4.隔震地基;11.x向运动组件;12.z向运动组件;13.β向旋转组件;14.y向运动组件;15.α向旋转组件;16.γ向旋转组件;17.支杆;18.试验模型;21.支撑柱;22.隔震密封波纹管;111.x向基座;112.x向直线导轨滑块机构;113.支撑柱安装法兰;114.x向丝杠法兰螺母组合件;115.x向伺服电机;116.x向法兰;121.z向基座;122.z向直线导轨滑块机构;123.x组件安装法兰;124.z向丝杠法兰螺母组合件;125.z向伺服电机;126.β向基座固定块;127.x向法兰环;131.β向下基座;132.β向上基座;133.β向圆弧导轨滑块机构;134.z组件安装法兰;135.滑块固定螺孔;136.β向圆弧齿轮齿条机构;137.y组件安装定位法兰;138.β向伺服电机;139.中轴;141.y向u形框架基座;142.y向导轨滑块机构;143.y向丝杠法兰螺母组合件;144.y向伺服电机;145.配重块;146.钢丝吊绳;147.配重块导向杆;148.定位法兰孔;151.α向旋转基座;152.α向圆弧导轨滑块机构;153.α向圆弧齿轮齿条机构;154.α向伺服电机;155.α向旋转平台;156.模型支撑弯臂;161.γ向基座;162.γ向旋转输出轴;163.γ向伺服电机。
具体实施方式
20.下面结合附图和实施例详细说明本发明。
21.如图1所示,本实施例的六自由度风洞试验模型姿态控制装置1位于试验段3内,通过隔震支柱组件2固定在隔震地基4上;所述的六自由度风洞试验模型姿态控制装置1包括从下至上、金字塔型分布的x向运动组件11、z向运动组件12、β向旋转组件13、y向运动组件14、α向旋转组件15和γ向旋转组件16;γ向旋转组件16的中心轴线上安装有支杆17,支杆17的前端安装有面向风洞来流的试验模型18;所述的隔震支柱组件2包括支撑柱21及隔震密封波纹管22;支撑柱21下端固定在隔震地基4上,上端通过x向运动组件11的支撑柱安装法兰113与x向运动组件11的x向基座111连接;隔震密封波纹管22套装在支撑柱21上,隔震密封波纹管22的下端焊接在支撑柱21
周围,上端通过法兰连接在试验段3壳体的下表面。
22.进一步地,如图2所示,所述的x向运动组件11包括:x向基座111、x向直线导轨滑块机构112、支撑柱安装法兰113、x向丝杠法兰螺母组合件114、x向伺服电机115和x向法兰116;所述的x向基座111为矩形平板,上表面设置有上安装面,下表面设置有下安装面;所述的上安装面上设置有x向直线导轨滑块机构112、x向丝杠法兰螺母组合件114、x向伺服电机115;x向丝杠法兰螺母组合件114具有丝杠螺母运动副,x向丝杠位于x向基座111的中心轴线上,与x向丝杠配装的x向螺母上设置有x向法兰116,z向运动组件12具有与x向法兰116对应的x向法兰环127,x向法兰环127装卡在x向法兰116上;x向直线导轨滑块机构112的导轨对称安装在x向丝杠的两侧、导轨上装卡有若干滑块,z向运动组件12具有与滑块一一对应的x组件安装法兰123,x组件安装法兰123装卡在对应的滑块上;所述的下安装面上设置有与支撑柱21对应的支撑柱安装法兰113,支撑柱安装法兰113与支撑柱21固定连接;所述的x向伺服电机115驱动x向丝杠转动,x向螺母沿x向丝杠移动,通过x向法兰116和x向直线导轨滑块机构112的滑块带动z向基座121沿x向运动,实现六自由度风洞试验模型姿态控制装置1带动试验模型18沿x向运动。
23.进一步地,如图3所示,所述的z向运动组件12包括z向基座121、z向直线导轨滑块机构122、x组件安装法兰123、z向丝杠法兰螺母组合件124、z向伺服电机125、β向基座固定块126和x向法兰环127;所述的z向基座121为矩形平板,上表面设置有上安装面,下表面设置有下安装面;所述的上安装面上设置有z向直线导轨滑块机构122、z向丝杠法兰螺母组合件124和z向伺服电机125;z向丝杠法兰螺母组合件124具有丝杠螺母运动副,z向丝杠与x向丝杠垂直,位于z向基座121的一个侧边,与z向丝杠配装的z向螺母上设置有β向基座固定块126,β向基座固定块126与β向运动组件13的β向下基座131的侧壁固定连接;z向直线导轨滑块机构122有2组,每组z向直线导轨滑块机构122的导轨均平行于z向丝杠,一根导轨和z向丝杠位于z向基座121的同一个侧边,另一根导轨位于z向基座121的对面侧边;z向直线导轨滑块机构122的导轨上装卡有若干滑块,β向运动组件13的β向下基座131的下表面设置有与滑块一一对应的z组件安装法兰134,z组件安装法兰134装卡在对应的滑块上;所述的下安装面上设置有与x向直线导轨滑块机构112的x向滑块对应的x组件安装法兰123,x组件安装法兰123装卡在x向直线导轨滑块机构112的x向滑块上;还设置有与x向法兰116对应的x向法兰环127,x向法兰环127装卡在x向法兰116上;所述的z向伺服电机125驱动z向丝杠转动,z向螺母沿丝杠移动,通过β向基座固定块126和z向直线导轨滑块机构122的滑块带动β向运动组件13的β向下基座131沿z向运动,实现六自由度风洞试验模型姿态控制装置1带动试验模型18沿z向运动。
24.进一步地,如图4a、图4b所示,所述的β向旋转组件13包括β向下基座131、β向上基座132、β向圆弧导轨滑块机构133、z组件安装法兰134、滑块固定螺孔135、β向圆弧齿轮齿条机构136、y组件安装定位法兰137、β向伺服电机138和中轴139;所述的β向旋转组件13为矩形块结构,分为上、中、下三层,上层为β向上基座132,中层为β向圆弧导轨滑块机构133,下层为β向下基座131,上、中、下三层的中心贯穿有中轴
139,中轴139与β向下基座131中心位置安装的轴承座配装;y向运动组件14的定位法兰孔148套装在中轴139上,并通过y组件安装定位法兰137实现共轴定位与固定;所述的β向圆弧导轨滑块机构133的圆弧导轨安装在β向下基座131的上安装面上,β向圆弧齿轮齿条机构136的圆弧齿条也安装在β向下基座131的上安装面上,圆弧导轨的半径小于圆弧齿条的半径,两者的圆心均与中轴139共轴;β向圆弧导轨滑块机构133的滑块通过滑块固定螺孔135固定在β向上基座132的下安装面上,滑块装卡在β向圆弧导轨滑块机构133的圆弧导轨上;β向伺服电机138安装β向上基座132上,β向伺服电机138的输出轴连接β向圆弧齿轮齿条机构136的齿轮,齿轮啮合β向圆弧齿轮齿条机构136的齿条;z组件安装法兰134安装在β向下基座131的下安装面上,z组件安装法兰134装卡在z向直线导轨滑块机构122的滑块上;β向基座固定块126通过螺母固定在β向下基座131的侧安装面;所述的β向伺服电机138启动,β向圆弧齿轮齿条机构136的齿轮啮合齿条,带动β向伺服电机138沿齿条转动,β向圆弧导轨滑块机构133的滑块沿圆弧导轨滑动,β向上基座132绕中轴139转动,实现六自由度风洞试验模型姿态控制装置1带动试验模型18改变偏航角β。
25.进一步地,如图5a、图5b所示,所述的y向运动组件14包括y向u形框架基座141、y向导轨滑块机构142、y向丝杠法兰螺母组合件143、y向伺服电机144、配重块145、钢丝吊绳146、配重块导向杆147和定位法兰孔148;所述的y向u形框架基座141的底部中心设有定位法兰孔148,通过y组件安装定位法兰137套装在中轴139上并固定;y向u形框架基座141两侧的竖直的塔形基座位于x向运动组件11的x向基座111中心轴线的两侧,一侧塔形基座为主动侧,另一侧塔形基座为从动侧,主动侧和从动侧的相对的侧面为内侧壁面,背离的侧面为外侧壁面;主动侧的内侧壁面设置有两组y向导轨滑块机构142,从动侧的内侧壁面设置有对应的另外两组y向导轨滑块机构142,y向导轨滑块机构142的导轨位于竖直方向,4根导轨上分别装卡有若干相互对应的滑块,滑块通过螺栓与α向旋转组件15的α向旋转基座151上设置的对应螺孔连接;α向旋转基座151的底部通过吊环固定有4根钢丝吊绳146,4根钢丝吊绳146分别通过塔形基座顶端的4个滑轮引出至塔形基座的外侧壁面,并分别与各自的配重块145连接;外侧壁面还安装有对配重块145进行上下运动导向的配重块导向杆147;主动侧的中心轴线上安装有y向丝杠法兰螺母组合件143,y向丝杠位于主动侧的中心轴线上,y向丝杠配装的y向螺母通过法兰与α向旋转基座151侧壁面连接;所述的y向伺服电机144驱动y向丝杠正向转动,y向螺母通过法兰带动α向旋转基座151向上移动,滑块沿导轨向上移动,同时配重块145沿配重块导向杆147向下运动,实现六自由度风洞试验模型姿态控制装置1带动试验模型18沿y向向上移动;y向伺服电机144驱动y向丝杠反向转动,实现六自由度风洞试验模型姿态控制装置1带动试验模型18沿y向向下移动。
26.进一步地,如图6a、图6b、图6c所示,所述的α向旋转组件15包括α向旋转基座151、α向圆弧导轨滑块机构152、α向圆弧齿轮齿条机构153、α向伺服电机154、α向旋转平台155和模型支撑弯臂156;所述的α向旋转基座151通过侧面的螺孔与y向运动组件14的y向导轨滑块机构142的滑块固连;α向旋转基座151通过法兰与y向丝杠法兰螺母组合件143的螺母固连;α向旋转基座151通过四条钢丝吊绳146分别与四组配重块145分别相连;α向旋转基座151上设置有α
向圆弧导轨滑块机构152和α向圆弧齿轮齿条机构153,α向圆弧导轨滑块机构152的圆弧导轨与α向圆弧齿轮齿条机构153的圆弧齿条并列排列;圆弧导轨上装卡有滑块,α向旋转平台155通过螺孔与滑块固定连接;α向旋转平台155上安装有α向伺服电机154,α向伺服电机154的输出轴与α向圆弧齿轮齿条机构153的齿轮固定连接,齿轮啮合圆弧齿条;模型支撑弯臂156的下端固定在α向旋转平台155上,模型支撑弯臂156的上端与γ向运动组件16的γ向基座161固定连接;所述的α向伺服电机154启动,α向圆弧齿轮齿条机构153的齿轮啮合圆弧齿条,带动α向伺服电机154沿齿条转动,α向圆弧导轨滑块机构152的滑块沿圆弧导轨滑动,α向旋转平台155及模型支撑弯臂156作圆弧运动,实现六自由度风洞试验模型姿态控制装置1带动试验模型18改变俯仰角α。
27.进一步地,如图7所示,所述的γ向旋转组件16包括γ向基座161、γ向旋转输出轴162和γ向伺服电机163;所述的γ向基座161安装在α向旋转组件15的模型支撑弯臂156的上端,γ向伺服电机163安装在γ向基座161内腔,γ向伺服电机163的输出轴与γ向输出轴162固定连接;所述的γ向伺服电机163启动,带动γ向输出轴162沿γ向基座161的中心轴线旋转,实现六自由度风洞试验模型姿态控制装置1带动试验模型18改变滚转角γ。
28.进一步地,所述的β向圆弧齿轮齿条机构136的圆弧齿条采用圆柱状齿轮牙。
29.进一步地,所述的α向圆弧齿轮齿条机构153的圆弧齿条采用圆柱状齿轮牙。
30.尽管本发明的实施方案已公开如上,但其并不仅仅限于说明书和实施方式中所列运用,它完全可以被适用于各种适合本发明的领域。对于熟悉本领域的人员而言,在不脱离本发明原理的前提下,可容易地实现另外的改进和润饰,因此在不背离权利要求及等同范围所限定的一般概念下,本发明并不限于特定的细节和这里示出与描述的图例。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种双楔型流量计的制作方法
- 压力检测装置的制作方法
- 一种雷达截面积实时估计算法的...
- 一种考虑一阶速度模糊的雷达点...
- 一种不对称波束情形下的一维同...
- 一种新型环境检测采样装置的制...
- 一种基于航迹生成杂波图处理雷...
- 一种基于扇块结构的一次点迹凝...
- 一种具有防护结构的水质监测装...
- 一种基于伺服转速的机扫雷达方...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1