车辆稳定控制方法及系统与流程
1.本发明涉及车辆技术领域,具体涉及一种车辆稳定控制方法及系统。
背景技术:
2.传统的车辆稳定控制系统如abs(防抱死系统),esc(车身稳定性控制系统)等,发展相对比较成熟,大多是根据驾驶员期望动态响应与实际车辆动态响应之间的差异,分别控制不同车轮的制动力,从而改变车辆横向和纵向轨迹,以实现车辆稳态控制的目的。
3.现有的车辆稳定系统通过施加制动力来控制车辆的横向轨迹,由于车辆横向动态控制相对于纵向更为敏感,利用不同车轮之间制动力差异控制难度较大,造成横摆角速度突变,往往带给驾驶员很差的驾驶感受,制动压力建立梯度过大或者过缓,都会带来系统的迟滞或者超调;因此采用不同轮之间制动力差异实现车辆横向控制是一种有效但并非完美的方式。
技术实现要素:
4.针对现有技术中的问题,本发明的目的在于提供一种车辆稳定控制方法及系统,基于电动助力转向技术,优化车辆的横向控制,实现车辆稳定控制。
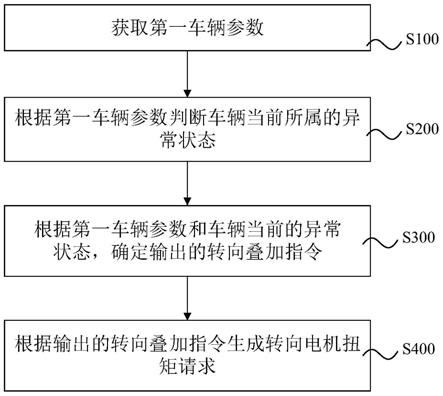
5.本发明实施例提供一种车辆稳定控制方法,包括如下步骤:
6.获取第一车辆参数;
7.根据所述第一车辆参数判断车辆当前所属的异常状态类型;
8.根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令;
9.根据所述输出的转向叠加指令生成用于驱动电动助力转向电机的转向电机扭矩请求。
10.可选地,所述根据所述第一车辆参数判断车辆当前的异常状态类型,包括如下步骤:
11.根据所述第一车辆参数计算得到第二车辆参数;
12.获取各个异常状态类型的判定条件,判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,将符合的判定条件所对应的异常状态类型确定为车辆当前的异常状态类型。
13.可选地,所述第一车辆参数包括各个车轮的轮速、横摆角速度、车速、侧向加速度、车辆减速度、方向盘转角和方向盘扭矩。
14.可选地,所述第二车辆参数包括前轴的横摆角速度参数yaw rate
fa
、后轴的横摆角速度参数yaw rate
ra
、方向盘转角的横摆角速度参数yaw rate
sa
和侧向加速度的横摆角速度参数yaw rate_ay;
15.采用如下公式,根据所述第一车辆参数计算得到所述第二车辆参数:
16.[0017][0018]
yaw rate
sa
=sa
×
vs
×
k1[0019][0020]
其中,wheel speed
fl
表示左前轮轮速,wheel speed
fr
表示右前轮轮速,track
fa
表示前轴的轮距,wheel speed
rl
表示左后轮轮速,wheel speed
rr
表示右后轮轮速,track
ra
表示后轴的轮距,sa表示方向盘转角,vs表示车速,k1表示预设的第一补偿系数,la表示侧向加速度,k2表示预设的第二补偿系数。
[0021]
可选地,所述第二车辆参数还包括各个车轮的修正轮速;
[0022]
所述根据所述第一车辆参数计算得到所述第二车辆参数,还包括如下步骤:
[0023]
根据方向盘转角和方向盘扭矩判断车辆是否处于直线行驶,并获取车辆在直线行驶时各个车轮的轮速;
[0024]
根据在直线行驶时各个车轮的轮速确定各个车轮的修正轮速,使得各个车轮的修正轮速相同。
[0025]
可选地,所述异常状态类型包括车轮状态异常;
[0026]
所述判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,包括采用如下步骤判断所述第一车辆参数和第二车辆参数是否符合车轮状态异常的判定条件:
[0027]
根据所述前轴的横摆角速度参数、后轴的横摆角速度参数以及横摆角速度,判断前轴和后轴是否出现异常;
[0028]
如果前轴和/或后轴出现异常,则对比各个车轮的修正轮速,定位异常轮速车轮;
[0029]
如果前轴和/或后轴出现异常,判定所述第一车辆参数和第二车辆参数符合车轮状态异常的判定条件。
[0030]
可选地,所述转向叠加指令包括转向扭矩叠加指令和/或转向角度叠加指令;
[0031]
所述根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令,包括如下步骤:
[0032]
如果车辆当前的异常状态类型为车轮状态异常,则确定异常轮速车轮,并根据异常轮速车轮的轮速与其他车轮的轮速的对比,判断异常轮速车轮的胎压状态;
[0033]
根据车辆减速度的值判断车辆运行状态;
[0034]
车速小于预设车速阈值且方向盘转角小于预设转角阈值时,确定输出的转向扭矩叠加指令;
[0035]
车速大于等于预设车速阈值且方向盘转角大于等于预设转角阈值时,确定输出的转向角度叠加指令。
[0036]
可选地,所述异常状态类型包括操作状态异常;
[0037]
所述判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,包括采用如下步骤判断所述第一车辆参数和第二车辆参数是否符合操作状态异常的判定条件:
[0038]
判断所述方向盘转角是否大于方向盘转角阈值,且方向盘扭矩大于方向盘扭矩阈值,如果是,则确定驾驶员处于转向操作;
[0039]
驾驶员处于转向操作时,计算方向盘转角的横摆角速度参数与横摆角速度的差
值,如果差值的绝对值大于第一阈值,则确定车辆符合操作状态异常的判定条件;
[0040]
驾驶员处于转向操作时,计算侧向加速度的横摆角速度参数与横摆角速度的差值,如果差值的绝对值大于第二阈值,则确定车辆符合操作状态异常的判定条件。
[0041]
可选地,所述转向叠加指令包括转向扭矩叠加指令和/或转向角度叠加指令;
[0042]
所述根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令,包括如下步骤:
[0043]
如果车辆当前的异常状态类型为操作状态异常,根据所述方向盘转角、所述方向盘力矩和所述横摆角速度,确定输出的转向扭矩叠加指令。
[0044]
可选地,所述异常状态类型包括路面状态异常;
[0045]
所述判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,包括采用如下步骤判断所述第一车辆参数和第二车辆参数是否符合路面状态异常的判定条件:
[0046]
判断所述方向盘转角和所述方向盘扭矩在预设时间范围内是否未发生变化,如果是,则确定驾驶员处于转向保持操作;
[0047]
驾驶员处于转向保持操作时,监测横摆角速度相关参数的在预设时间段内的变化值,如果变化值超过第三阈值,则确定车辆符合路面状态异常的判定条件,所述横摆角速度相关参数包括横摆角传感器检测的横摆角速度、计算得到的前轴的横摆角速度参数和计算得到的后轴的横摆角速度参数中的一个或多个参数。
[0048]
可选地,所述转向叠加指令包括转向扭矩叠加指令和/或转向角度叠加指令;
[0049]
所述根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令,包括如下步骤:
[0050]
如果车辆当前的异常状态类型为路面状态异常,判断车速是否大于车速阈值,如果车速大于车速阈值,则根据所述横摆角速度和所述车速确定输出的转向扭矩叠加指令;
[0051]
如果车速小于等于车速阈值,则根据所述横摆角速度和所述车速确定输出的转向角度叠加指令。
[0052]
可选地,所述根据所述输出的转向叠加指令生成转向电机扭矩请求,包括如下步骤:
[0053]
根据所述方向盘转角和方向盘扭矩确定操作转向指令;
[0054]
根据所述输出的转向叠加指令与所述操作转向指令叠加后的转向指令生成转向电机扭矩请求。
[0055]
可选地,将所述输出的转向叠加指令与所述操作转向指令叠加后之后,还包括如下步骤:
[0056]
判断所述输出的转向叠加指令与所述操作转向指令叠加之后,对应的车速是否大于第四阈值;
[0057]
如果车速大于第四阈值,则判断所述输出的转向叠加指令与所述操作转向指令叠加之后的转向扭矩叠加值是否大于预设扭矩阈值,如果是,则根据所述预设扭矩阈值生成转向电机扭矩请求,否则根据所述转向扭矩叠加值生成转向电机扭矩请求。
[0058]
本发明实施例还提供一种车辆稳定控制系统,应用于所述的车辆稳定控制方法,所述系统包括:
[0059]
车辆动态监测模块,用于获取第一车辆参数;
[0060]
异常状态类型监测模块,用于根据所述第一车辆参数判断车辆当前的异常状态类型;
[0061]
车辆动态抑制模块,用于根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令;
[0062]
转向请求生成模块,用于根据所述输出的转向叠加指令生成用于驱动电动助力转向电机的转向电机扭矩请求。
[0063]
可选地,所述车辆动态监测模块还用于根据所述第一车辆参数计算得到第二车辆参数;
[0064]
所述异常状态类型监测模块用于获取各个异常状态类型的判定条件,判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,将符合的判定条件所对应的异常状态类型确定为车辆当前的异常状态类型。
[0065]
可选地,所述转向请求生成模块,用于根据所述方向盘转角和方向盘扭矩确定操作转向指令,并且将所述输出的转向叠加指令与操作转向指令叠加后之后,判断对应的车速是否大于第四阈值;
[0066]
如果车速大于第四阈值,则判断所述输出的转向叠加指令与所述操作转向指令叠加之后的转向扭矩叠加值是否大于预设扭矩阈值,如果是,则根据所述预设扭矩阈值生成转向电机扭矩请求,否则根据所述转向扭矩叠加值生成转向电机扭矩请求。
[0067]
可选地,所述系统还包括车辆侧向控制模块,用于将所述转向电机扭矩请求发送至电动助力转向电机。
[0068]
本发明所提供的车辆稳定控制方法及系统具有如下优点:
[0069]
本发明提供了一种基于电动助力转向技术实现车辆稳定控制的技术方案,通过结合电动助力转向技术和车辆动态控制技术,可以获得更加精确的动态响应,并带来更好的驾驶体验,提高在车辆制动干预之前的车辆稳定性,适用于大范围推广应用。
附图说明
[0070]
通过阅读参照以下附图对非限制性实施例所作的详细描述,本发明的其它特征、目的和优点将会变得更明显。
[0071]
图1是本发明一实施例的车辆稳定控制方法的流程图;
[0072]
图2是本发明一实施例的车辆稳定控制系统的结构示意图;
[0073]
图3是本发明一实施例的车辆稳定控制系统的输入输出示意图
[0074]
图4为本发明一实施例的车辆动态监测模块的输入输出示意图;
[0075]
图5为本发明一实施例的异常撞他监测模块的输入输出示意图。
[0076]
图6为本发明一实施例的车轮状态异常判定的流程图;
[0077]
图7为本发明一实施例的操作状态异常判定的流程图;
[0078]
图8为本发明一实施例的路面状态异常判定的流程图。
具体实施方式
[0079]
现在将参考附图更全面地描述示例实施方式。然而,示例实施方式能够以多种形式实施,且不应被理解为限于在此阐述的实施方式;相反,提供这些实施方式使得本发明将
全面和完整,并将示例实施方式的构思全面地传达给本领域的技术人员。在图中相同的附图标记表示相同或类似的结构,因而将省略对它们的重复描述。
[0080]
如图1所示,为了解决现有技术中的技术问题,本发明提供了一种车辆稳定控制方法,包括如下步骤:
[0081]
s100:获取第一车辆参数;
[0082]
s200:根据所述第一车辆参数判断车辆当前所属的异常状态类型;
[0083]
s300:根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令,所述转向叠加指令包括转向扭矩叠加指令和/或转向角度叠加指令;
[0084]
s400:根据所述输出的转向叠加指令生成用于驱动电动助力转向电机的转向电机扭矩请求。
[0085]
因此,本发明的车辆稳定控制方法提供了一种基于电动助力转向技术实现车辆稳定控制的技术方案,通过步骤s100和步骤s200识别到车辆的异常状态以及异常状态类型,通过步骤s300和步骤s400来根据异常状态类型生成可以驱动电动助力转向电机的转向电机扭矩请求,从而可以结合电动助力转向技术和车辆动态控制技术,获得更加精确的动态响应,提高在车辆制动干预之前的车辆稳定性,并带来更好的驾驶体验。
[0086]
如图2所示,本发明还提供了一种车辆稳定控制系统,所述系统包括:
[0087]
车辆动态监测模块m100,用于获取第一车辆参数,即执行上述步骤s100;
[0088]
异常状态类型监测模块m200,用于根据所述第一车辆参数判断车辆当前的异常状态类型,即执行上述步骤s200;
[0089]
车辆动态抑制模块m300,用于根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令,所述转向叠加指令包括转向扭矩叠加指令和/或转向角度叠加指令,即执行上述步骤s300;
[0090]
转向请求生成模块m400,用于根据所述输出的转向叠加指令生成用于驱动电动助力转向电机的转向电机扭矩请求,即执行上述步骤s400。
[0091]
进一步地,在该实施例中,所述车辆稳定控制系统还可以包括车辆侧向控制模块m500,用于将所述转向电机扭矩请求发送至电动助力转向电机。
[0092]
因此,该实施例的车辆稳定控制系统通过车辆动态监测模块m100和异常状态类型监测模块m200识别到车辆的异常状态以及异常状态类型,通过车辆动态抑制模块m300和转向请求生成模块m400来根据异常状态类型生成可以驱动电动助力转向电机的转向电机扭矩请求,并且可以通过车辆侧向控制模块m500将转向电机扭矩请求发送至电动助力转向电机,从而可以结合电动助力转向技术和车辆动态控制技术,获得更加精确的动态响应,提高在车辆制动干预之前的车辆稳定性。
[0093]
本发明的车辆稳定控制系统可以直接设置于电动助力转向系统内部,例如设置于电动助力转向系统的电子控制单元中,并且第一车辆参数可以从车辆的各个已有传感器中直接获取,而无需另外增加硬件设备。但本发明不限于此,在其他实施方式中,该车辆稳定控制系统也可以设置在其他的系统中,或者单独设置一个电子控制单元,来执行该车辆稳定控制系统的功能等,均属于本发明的保护范围之内。
[0094]
如图3所示,为该实施例中,车辆稳定控制系统的输入输出示意图。其中,在车辆稳定控制系统的左侧为第一车辆参数,在该实施例中,所述第一车辆参数包括各个车轮的轮
速(左前轮轮速、右前轮轮速、左后轮轮速和右后轮轮速)、横摆角速度、车速、侧向加速度、车辆减速度、方向盘转角和方向盘扭矩,在车辆稳定控制系统的右侧为接收输出指令的组件,主要包括电动助力转向电机和车辆人机交互系统,配置为根据转向电机扭矩请求执行助力转向动作。在车辆检测到异常状态时,同时可以通过车辆人机交互系统(hmi)发送提醒信息给驾驶员。
[0095]
在该实施例中,所述步骤s200中,采用如下步骤根据所述第一车辆参数判断车辆当前的异常状态类型:
[0096]
所述车辆动态监测模块m100根据所述第一车辆参数计算得到第二车辆参数;
[0097]
所述异常状态类型监测模块m200获取各个异常状态类型的判定条件,判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,将符合的判定条件所对应的异常状态类型确定为车辆当前的异常状态类型。
[0098]
如图4所示,在该实施例中,所述第二车辆参数包括前轴的横摆角速度参数yaw rate
fa
、后轴的横摆角速度参数yaw rate
ra
、方向盘转角的横摆角速度参数yaw rate
sa
和侧向加速度的横摆角速度参数yaw rate_ay。
[0099]
采用如下公式,根据所述第一车辆参数计算得到所述第二车辆参数:
[0100][0101][0102]
yaw rate
sa
=sa
×
vs
×
k1[0103][0104]
其中,wheel speed
fl
表示左前轮轮速,wheel speed
fr
表示右前轮轮速,track
fa
表示前轴的轮距,wheel speed
rl
表示左后轮轮速,wheel speed
rr
表示右后轮轮速,track
ra
表示后轴的轮距,sa表示方向盘转角,vs表示车速,k1表示预设的第一补偿系数,la表示侧向加速度,k2表示预设的第二补偿系数。
[0105]
进一步地,所述第二车辆参数还包括各个车轮的修正轮速:左前轮的修正轮速、右前轮的修正轮速、左后轮的修正轮速和右后轮的修正轮速。
[0106]
所述根据所述第一车辆参数计算得到所述第二车辆参数,还包括如下步骤:
[0107]
根据方向盘转角和方向盘扭矩判断车辆是否处于直线行驶,并获取车辆在直线行驶时各个车轮的轮速;
[0108]
根据在直线行驶时各个车轮的轮速确定各个车轮的修正轮速,使得各个车轮的修正轮速相同。
[0109]
其中,当方向盘转角为0度即中间位置,并且驾驶员没有作用力在方向盘上,方向盘扭矩小于一定值,这时系统定义为直线行驶,各个车轮的转速理应相同。因此,判断各个车轮的轮速是否均为一致,如果四个车轮轮速均十分相近,则各个车轮状态均正常,将修正轮速确定为四个车轮的共同轮速。如果有一个与其他三个的车轮的轮速相差很大,则将该相差很大的车轮的修正轮速也根据其他三个车轮的轮速设定。
[0110]
如图5所示,在该实施例中,所述异常状态类型包括车轮状态异常、操作状态异常和路面状态异常。但本发明不限于此,在其他可选的实施方式中,异常状态类型也可以包括其他类型的异常状态,或者只包括车轮状态异常、操作状态异常和路面状态异常中的一种或两种。
[0111]
如图6所示,在该实施例中,所述判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,包括所述异常状态类型监测模块m200采用如下步骤判断所述第一车辆参数和第二车辆参数是否符合车轮状态异常的判定条件:
[0112]
根据所述前轴的横摆角速度参数、后轴的横摆角速度参数以及横摆角速度,判断前轴和后轴是否出现异常;
[0113]
此处根据阿克曼转角原理,可以通过前后轴的左右侧车轮计算出前后轴的横摆角速度,对比车上安装的横摆角速度传感器,判断哪根轴上的计算有问题。具体地,比较前轴的横摆角速度参数和横摆角速度,如果差值大于预设横摆角差值阈值,则判断前轴出现异常,比较后轴的横摆角速度参数和横摆角速度,如果差值大于预设横摆角差值阈值,则判断后轴出现异常;
[0114]
如果前轴和/或后轴出现异常,则对比各个车轮的修正轮速,定位异常轮速车轮;具体地,可以对比各个车轮的实际轮速与修正轮速,如果一个车轮的实际轮速与修正轮速相差很大,则说明该车轮异常,当前轴异常时,修正轮速以后轮的轮速为准确定,当后轴异常时,修正轮速以前轮的轮速为准确定,四个车轮的修正轮速均是相同的,实际轮速可能会有不同,实际轮速和修正轮速相差很大的车轮为异常车轮;
[0115]
如果前轴和/或后轴出现异常,判定所述第一车辆参数和第二车辆参数符合车轮状态异常的判定条件。
[0116]
在该实施例中,所述车辆动态抑制模块m300采用如下步骤根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令:
[0117]
如果车辆当前的异常状态类型为车轮状态异常,则确定异常轮速车轮,并根据异常轮速车轮的轮速与其他车轮的轮速的对比,判断异常轮速车轮的胎压状态;
[0118]
具体地,可以通过异常速度车轮与其他车轮速度的对比来判断异常轮速车轮的胎压状态,例如计算异常速度车轮/正常轮速平均值=w,根据w值的大小判断异常轮速车轮的胎压情况,w值处于第一范围内时,轮胎发生爆胎故障,w值处于第二范围内时,轮胎发生漏气故障等。
[0119]
根据车辆减速度的值判断车辆运行状态(加速行驶、减速行驶、匀速行驶);
[0120]
车辆动态较小时,确定输出的转向扭矩叠加指令,此处车辆动态较小指的是车速小于一设定的车速阈值且方向盘转角小于一设定的转角阈值;
[0121]
车辆动态较大时,确定输出的转向角度叠加指令,此处车辆动态较大指的是车速大于等于一设定的车速阈值或方向盘转角大于等于一设定的转角阈值。
[0122]
其中,确定输出的转向扭矩叠加指令和确定输出的转向角度叠加指令时,可以根据预先设定的自适应模型(例如:预先设定好模型参数的pid模型等)来确定对应的输出值,也可以通过简单的查表,即查找一预设的第一车辆参数和第二车辆参数中的至少部分参数与转向扭矩叠加指令的映射关系表,或查找一预设的第一车辆参数和第二车辆参数中的至少部分参数与转向角度叠加指令的映射关系表。具体地,在车轮状态异常时,可以根据异常
车轮的位置、异常车轮的胎压情况以及车辆运行状态来查表获取对应的转向扭矩叠加指令或转向角度叠加指令。
[0123]
如图7所示,在该实施例中,所述判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,包括所述异常状态类型监测模块m200采用如下步骤判断所述第一车辆参数和第二车辆参数是否符合操作状态异常的判定条件:
[0124]
判断所述方向盘转角是否大于方向盘转角阈值,且方向盘扭矩大于方向盘扭矩阈值,如果是,则确定驾驶员处于转向操作;
[0125]
驾驶员处于转向操作时,计算方向盘转角的横摆角速度参数与横摆角速度的差值,如果差值的绝对值大于第一阈值,则确定车辆符合操作状态异常的判定条件,说明存在转向不足的问题;
[0126]
驾驶员处于转向操作时,计算侧向加速度的横摆角速度参数与横摆角速度的差值,如果差值的绝对值大于第二阈值,则确定车辆符合操作状态异常的判定条件,说明存在转向过度的问题。
[0127]
所述车辆动态抑制模块m300采用如下步骤根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令:
[0128]
如果车辆当前的异常状态类型为操作状态异常,根据所述方向盘转角、所述方向盘力矩和所述横摆角速度,确定输出的转向扭矩叠加指令。
[0129]
其中,确定输出的转向扭矩叠加指令和确定输出的转向角度叠加指令时,可以根据预先设定的自适应模型(例如:预先设定好模型参数的pid模型等)来确定对应的输出值,也可以通过简单的查表,即查找一预设的第一车辆参数和第二车辆参数中的至少部分参数与转向扭矩叠加指令的映射关系表,或查找一预设的第一车辆参数和第二车辆参数中的至少部分参数与转向角度叠加指令的映射关系表。具体地,在操作状态异常时,可以根据操作状态异常的情况是转向不足还是转向过度、方向盘转角的横摆角速度参数与横摆角速度的差值、侧向加速度的横摆角速度参数与横摆角速度的差值等参数来查表,确定输出的转向扭矩叠加指令或转向角度叠加指令。
[0130]
如图8所示,所述判定所述第一车辆参数和所述第二车辆参数所符合的判定条件,包括所述异常状态类型监测模块m200采用如下步骤判断所述第一车辆参数和第二车辆参数是否符合路面状态异常的判定条件:
[0131]
判断所述方向盘转角和所述方向盘扭矩在预设时间范围内是否未发生变化,如果是,则确定驾驶员处于转向保持操作;
[0132]
驾驶员处于转向保持操作时,监测横摆角速度相关参数的在预设时间段内的变化值,如果变化值超过第三阈值,则确定车辆符合路面状态异常的判定条件,所述横摆角速度相关参数包括横摆角传感器检测的横摆角速度、计算得到的前轴的横摆角速度参数和计算得到的后轴的横摆角速度参数中的一个或多个参数。
[0133]
在该实施例中,所述车辆动态抑制模块m300采用如下步骤根据所述第一车辆参数和车辆当前的异常状态类型,确定输出的转向叠加指令:
[0134]
如果车辆当前的异常状态类型为路面状态异常,判断车速是否大于车速阈值,如果车速大于车速阈值,则根据所述横摆角速度和所述车速确定输出的转向扭矩叠加指令;
[0135]
如果车速小于等于车速阈值,则根据所述横摆角速度和所述车速确定输出的转向
角度叠加指令。其中车速阈值可以预先根据不同车辆的底盘结构和特征进行设定。
[0136]
其中,确定输出的转向扭矩叠加指令和确定输出的转向角度叠加指令时,可以根据预先设定的自适应模型(例如:预先设定好模型参数的pid模型等)来确定对应的输出值,也可以通过简单的查表,即查找一预设的第一车辆参数和第二车辆参数中的至少部分参数与转向扭矩叠加指令的映射关系表,或查找一预设的第一车辆参数和第二车辆参数中的至少部分参数与转向角度叠加指令的映射关系表。具体地,在存在路面状态异常时,可以根据横摆角速度相关参数的变化值来查表,确定对应的转向扭矩叠加指令和转向角度叠加指令。
[0137]
在该实施例中,所述根据所述输出的转向叠加指令生成转向电机扭矩请求,包括如下步骤:
[0138]
根据所述方向盘转角和方向盘扭矩确定操作转向指令,其中操作转向指令可以由电动助力转向系统根据方向盘的输入进行确定;
[0139]
根据所述输出的转向叠加指令与所述操作转向指令叠加后的转向指令生成转向电机扭矩请求。
[0140]
在该实施例中,将所述输出的转向叠加指令与所述操作转向指令叠加后之后,还包括对转向电机扭矩的最大值根据车速进行限制的步骤,避免在车速较高时施加过大的转向电机扭矩,具体地,包括如下步骤:
[0141]
所述输出的转向叠加指令与所述操作转向指令叠加之后,判断对应的车速是否大于第四阈值;
[0142]
如果是,则将叠加之后的转向电机扭矩的最大值设定为预设的转向扭矩阈值,对转向电机扭矩进行限制。
[0143]
具体地,在车速大于第四阈值的情况下,判断所述输出的转向叠加指令与所述操作转向指令叠加之后的转向扭矩叠加值是否大于预设扭矩阈值,如果是,则根据所述预设扭矩阈值生成转向电机扭矩请求,否则根据所述转向扭矩叠加值生成转向电机扭矩请求。
[0144]
其中,根据所述预设扭矩阈值生成转向电机扭矩请求,可以是根据预设扭矩阈值的限制将转向扭矩叠加值乘以对应的系数来缩小转向扭矩叠加值,该系数可以查表得到,也可以直接将转向电机扭矩请求中的转向扭矩值设置为预设扭矩阈值。
[0145]
综上所述,与现有技术相比,本发明提供了一种基于电动助力转向技术实现车辆稳定控制的技术方案,通过结合电动助力转向技术和车辆动态控制技术,可以获得更加精确的动态响应,并带来更好的驾驶体验,提高在车辆制动干预之前的车辆稳定性,适用于大范围推广应用。
[0146]
以上内容是结合具体的优选实施方式对本发明所作的进一步详细说明,不能认定本发明的具体实施只局限于这些说明。对于本发明所属技术领域的普通技术人员来说,在不脱离本发明构思的前提下,还可以做出若干简单推演或替换,都应当视为属于本发明的保护范围。
完整全部详细技术资料下载
当前第1页 1 2 3
相关技术
- 锁固结构及具有该锁固结构的电...
- 内藏式煞车装置的制作方法
- 具有空气调节的骑乘车辆的制作...
- 一种车辆折叠接头的制作方法
- 鞍乘型车辆的制作方法
- 用于机动车辆的风挡及具有这种...
- 用于重型机械履带的柔性履带板...
- 挡风玻璃和前罩板通风孔的连接...
- 车架及具有其的车辆的制作方法
- 转向机构、转向系统、车辆及控...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1
车辆动态稳定控制系统相关技术
- 基于车辆位置动态更新电话簿的方法和系统的制作方法
- 一种微电网动态稳定控制方法、设备及系统的制作方法
- 使用动态电网对车辆进行充电的系统和方法以及管理车辆中的耗电的系统和方法
- 车辆动态信息处理方法及其系统的制作方法
- 停车场车辆出入控制系统的制作方法
- 一种住宅小区车辆出入智能控制系统的制作方法
- 车辆横摆稳定系统的制作方法
- 车辆稳定性控制系统及轮胎测试系统的制作方法
- 车辆在线调度控制系统的制作方法
- 动态光在线粒径量测与控制系统的制作方法
车辆电子稳定控制系统相关技术
- 基于位置的车辆电子排队系统的排队方法与流程
- 稳定发动机离合器控制的方法、发动机离合器系统及车辆与流程
- 电子增压器的控制方法、系统及车辆与流程
- 电子增压器的控制方法、系统及车辆与流程
- 一种用于汽车电子稳定控制系统中的增压阀的制造方法与工艺
- 一种用于汽车电子稳定控制系统中的新型减压阀的制造方法与工艺
- 一种用于汽车电子稳定控制系统中的吸入阀的制造方法与工艺
- 车辆用自动变速器的电子控制装置的制造方法
- 电子控制的车辆悬架系统和制造方法与流程
- 电子驻车的控制方法、系统及车辆与制造工艺
车辆稳定控制系统灯亮相关技术
- 一种具有自稳定系统的高空作业车及其自稳定控制方法与制造工艺
- 车辆和控制该车辆的方法与制造工艺
- 电子驻车的控制方法、系统及车辆与制造工艺
- 用于控制车辆的驾驶的方法与制造工艺
- 用于控制车辆的驱动的系统及方法与制造工艺
- 用于车辆侧向控制的系统和方法与制造工艺
- 一种车辆控制装置及具有其的车辆的制造方法
- 一种高稳定性车辆轮胎的制造方法与工艺
- 一种车辆升降系统的制造方法与工艺
- 车辆及其车用led灯系统和车用led灯的制作方法
车辆稳定系统相关技术
- 车辆稳定杆衬套组件的制作方法
- 用于车辆的摇动稳定杆的制作方法
- 用于稳定的后坐量值响应的车辆悬架系统的制作方法
- 具有枢轴支撑架的车辆稳定系统的制作方法
- 车辆传感器装置及使用车辆传感器装置的车辆稳定系统的制作方法
- 用于在稳定车辆时辅助车辆操作者的方法及装置的制作方法
- 用于在稳定车辆时辅助车辆操作者的方法及装置的制作方法
- 具有多方位控制的车辆稳定系统的制作方法
- 用于保持材料搬运车辆的动态稳定性的系统和方法
- 用于利用集成的避免倾翻的功能稳定车辆的方法
电控车辆稳定行驶系统相关技术
- 一种车辆悬架电控系统的制作方法
- 用于车辆的电控模块安装支架及具有其的车身和车辆的制作方法
- 一种车辆电控系统故障快速检索方法
- 一种轨道车辆用电控系统的制作方法
- 行驶控制装置、车辆、交通系统、控制方法、以及程序的制作方法
- 一种车辆自动稳定杆的制作方法
- 行驶数据记录装置、记录系统及车辆的制作方法
- 车辆行驶辅助系统的制作方法
- 一种基于双处理器的车辆行驶记录系统的制作方法
- 一种能够采集本车前后车辆速度信息的行驶记录系统的制作方法
汽车防碰撞预警系统相关技术
- 高等教育专业结构调整预警系统的制作方法
- 防碰撞的平衡车的制作方法
- 一种赤潮自动预警系统的制作方法
- 一种预警系统的制作方法
- 一种汽车刹车灯预警系统的制作方法
- 自走装置的防碰撞、缓碰撞及沿墙系统的制作方法
- 缝纫机的防碰撞缓冲机头的制作方法
- 公路远程预警系统的制作方法
- 一种汽车防盗侦测预警系统的制作方法
- 一种汽车安全门预警装置的制造方法