低坐姿的多向调节零重力座椅骨架的制作方法
1.本发明涉及汽车座椅技术领域,特别涉及一种低坐姿的多向调节零重力座椅骨架。
背景技术:
2.为提高汽车座椅的乘座舒适性,座椅骨架各部分之间的多个连接处设计为可调节连接,以便于调节座椅姿态,从而对身体各部位起到充分而适当的支撑,基于此,提出了零重力座椅的概念。零重力座椅为乘客提供了一种更符合人体工学,更健康的乘坐姿态,多适用于副驾驶或后排座椅。零重力座椅姿态可以帮助减轻脊椎压力,舒张背部肌肉,减轻心脏压力,同时可以促进血液循环,能增强汽车的乘坐舒适度,同时更好地保护乘员的健康。
3.目前新能源汽车成为了汽车产业发展的重要趋势,而其动力来源于电池包,电池布置形式虽多种多样,但目前最长用的布置还是在整车底盘下方,这样必然会使整车地台升高,压缩了座椅布置的空间。但现有的零重力座椅一般采用电动调角器驱动或推杆驱动,电动调角器内部为凸轮结构,在运动过程中会承波浪摆动,舒适性较差;推杆驱动需要单独做遮蔽,成本较高;且两种驱动方式都需要较大的安装空间,无法实现低坐姿的座椅布置。
4.此外,零重力也带来了一些座椅附属结构设计的难题。例如,由于调节幅度较大,安全带无法有效约束住人体,发生紧急刹车或者碰撞时无法保护乘员安全,所以零重力座椅的安全带卷收器必须安装在座椅本体上,而不能像传统座椅一样安装在车身上。目前市面上出现了将安全带卷收器安装在靠背骨架上的座椅,卷收器一般设置为角度变化12
°
时不锁止,大于27度锁止即可,当卷收器布置在座椅靠背时,在零重力座椅姿态下,靠背骨架调节角度会超出27
°
,卷收器会锁止,无法拉出,影响正常使用,因零重力调节有多个旋转中心(靠背旋转、坐垫旋转、调高旋转等),现有技术无法布置带靠背角度补偿的卷收器。
技术实现要素:
5.为了解决上述技术问题,本发明旨在提供一种低坐姿的多向调节零重力座椅骨架,该座椅骨架的倾角和高度均可调节,两者配合能实现零重力调节,且倾角和高度调节的驱动装置占用空间小,能满足低坐姿的座椅布置;该座椅骨架的安全带卷收器能布置在座框骨架的下方,以解决零重力调节对安全带卷收器使用的影响;该座椅骨架的腿托既能由收纳位置抬升至使用位置,又能延伸加长,以满足不同乘客的需求,有效缓解乘客长时间乘坐汽车时带来的腿部疲劳。
6.为了实现上述目的,本发明提出了一种低坐姿的多向调节零重力座椅骨架,包括靠背骨架、座框骨架、左滑轨总成和右滑轨总成,所述座框骨架包括两侧边板、前横管和后横管,以及设在前横管上的两坐盆支架,所述左滑轨总成的上滑轨上设有左滑轨前支架和左滑轨后支架,所述右滑轨总成的上滑轨上设有右滑轨前支架和右滑轨后支架,还包括左一前连杆、左二前连杆、右前连杆和右后连杆,所述左一前连杆的下端与左滑轨前支架铰接,所述左一前连杆的上端与左二前连杆铰接,所述左二前连杆的另一端与前横管铰接,所
述右前连杆的下端与右滑轨前支架铰接,所述右前连杆的上端与前横管之间设有第一齿板驱动装置,所述第一齿板驱动装置能通过前横管的运动调节座框骨架的倾角;所述右后连杆的下端与右滑轨后支架铰接,所述右后连杆的上端与后横管固定连接,所述左滑轨后支架与左侧的侧边板之间设有第二齿板驱动装置,所述第二齿板驱动装置能通过后横管的运动调节座框骨架的高度;
7.所述座框骨架的下方设有安全带卷收器,所述安全带卷收器通过卷收器固定支架固定在左右两侧的上滑轨上,所述座框骨架和靠背骨架上均设有安全带导向支架,使安全带向后绕过后横管,再向上延伸至靠背骨架上;
8.所述座框骨架的前端设有腿托,所述腿托包括两腿托支架、下支撑板和上支撑板,两腿托支架分别固定于两坐盆支架上,腿托横杆可转动地设置于两腿托支架之间,所述腿托横杆上左右相对设置有两四连杆机构,所述四连杆机构包括第一连杆、第二连杆、第三连杆和第四连杆,所述第一连杆的上端与腿托横杆固定连接,所述第一连杆的下端与第二连杆的上端铰接,所述第二连杆的中部与第三连杆的中部铰接,所述第二连杆的下端与下支撑板铰接,所述第三连杆的上端与对应侧的腿托支架铰接,所述第三连杆的下端与第四连杆的上端铰接,所述第四连杆的下端与下支撑板铰接,且每个四连杆机构与下支撑板的两铰接点间隔设置,所述前横管上设有第一丝杆螺母机构,所述第一丝杆螺母机构与从动杆的下端铰接,所述从动杆的上端与腿托横杆固定连接,所述第一丝杆螺母机构能带动从动杆转动,从而带动腿托横杆转动,进而带动四连杆机构运动,四连杆机构运动能带动下支撑板抬升至使用位置或收折在收纳位置,所述下支撑板上设有前后延伸的腿托滑轨,所述上支撑板滑动连接在腿托滑轨上,所述下支撑板与上支撑板之间设有第二丝杆螺母机构,所述第二丝杆螺母机构能带动上支撑板沿腿托滑轨前后移动。
9.上述方案中:所述第一齿板驱动装置包括倾角调节齿板和倾角调节电机,所述倾角调节电机通过倾角调节电机固定支架固定于前横管上,所述前横管焊接固定在两侧边板之间,所述倾角调节电机的输出轴上套装有第一驱动齿轮,所述倾角调节齿板为扇形板,所述倾角调节齿板通过圆心孔铰接安装在前横管上,所述右前连杆的上端与倾角调节齿板的另一端铰接,所述倾角调节齿板的弧形齿朝前,所述第一驱动齿轮与倾角调节齿板啮合,所述左二前连杆与倾角调节齿板之间固定连接有倾角调节连接板,当倾角调节电机驱动第一驱动齿轮转动时,第一驱动齿轮能带动倾角调节齿板绕前横管转动,倾角调节齿板转动时能带动右前连杆转动,倾角调节齿板和右前连杆同时转动能调节前横管在高度上的位置,从而调节座框骨架的倾角。第一齿板驱动装置由简单的齿板和电机组成,占用空间小,在实现倾角调节的同时能满足低坐姿的座椅布置,且能为安全带卷收器留出了足够的安装空间。
10.上述方案中:所述第二齿轮驱动装置包括高度调节齿板和高度调节电机,所述高度调节齿板为扇形板,所述高度调节齿板通过圆心孔焊接固定在后横管上,所述后横管铰接安装在两侧边板之间,所述高度调节齿板的另一端与左滑轨后支架铰接,所述高度调节齿板的弧形齿朝前,所述高度调节电机通过高度调节电机固定支架固定在左侧的侧边板上,所述高度调节电机的输出轴上套装有第二驱动齿轮,所述第二驱动齿轮与高度调节齿板啮合,当高度调节电机驱动第二驱动齿轮转动时,第二驱动齿轮能驱动高度调节齿板带动后横管相对侧边板转动,高度调节齿板受驱绕左滑轨后支架转动同时能调节后横管在高
度上的位置,从而调节座框骨架的高度。第二齿板驱动装置由简单的齿板和电机组成,占用空间小,在实现高度调节的同时能满足低坐姿的座椅布置。
11.上述方案中:所述第一丝杆螺母机构由第一电动丝杆和第一螺母组成,所述第一螺母固定在前横管上,所述第一电动丝杆的丝杆套装在第一螺母中,所述从动杆的下端铰接在第一电动丝杆的电机上,当第一电动丝杆的电机驱动丝杆转动时,所述第一电动丝杆相对第一螺母作直线运动,从而带动从动杆转动,从动杆转动能带动腿托横杆转动。通过第一丝杆螺母机构与从动杆联动,实现腿托横杆转动,进而实现腿托的翻转,该结构设计巧妙,第一电动丝杆能水平布设在座框骨架的下方,在高度上占用空间小,有利于实现低坐姿的座椅布置。
12.上述方案中:所述第二丝杆螺母机构由第二电动丝杆和第二螺母组成,所述第二电动丝杆的丝杆的延伸方向与腿托滑轨的延伸方向一致,所述第二螺母套装在该丝杆上且与上支撑板固定,当第二电动丝杆的电机驱动丝杆转动时,第二螺母能沿该丝杆的延伸方向移动,从而带动上支撑板沿腿托滑轨前后移动。通过简单的丝杆螺母机构实现上支撑板相对下支撑板的移动,从而实现腿托的延伸加长,以满足不同乘客的需求。
13.上述方案中:所述腿托滑轨为塑料滑轨,所述塑料滑轨由带有蜂窝状镂空的塑料板制成,所述塑料滑轨上设有螺栓孔,所述上支撑板上设有前后延伸的导向孔,连接螺栓穿过导向孔固定在螺栓孔中将上支撑板与塑料滑轨滑动连接在一起。连接螺栓既与导向孔配合为上支撑板的移动起导向作用,又能防止上支撑板与塑料滑轨分离。
14.上述方案中:所述倾角调节齿板上设置有第一弧形定位孔,所述第一弧形定位孔与倾角调节齿板同圆心,所述倾角调节电机固定支架上设有插入到第一弧形定位孔中的第一销轴,所述倾角调节齿板受驱转动时,所述第一销轴能沿第一弧形定位孔转动。第一弧形定位孔与第一销轴配合实现对倾角调节齿板的翻转限位,防止倾角调节齿板由于翻转过度与第一驱动齿轮分离。
15.上述方案中:两侧边板的内侧相对焊接有固定轴套,所述前横管的两端分别穿过两固定轴套焊接在对应的侧边板上,右侧的固定轴套上焊接有倾角调节电机电解板,所述倾角调节电机电解板的另一端固定在倾角调节电机固定支架上,所述第一驱动齿轮与倾角调节齿板啮合在倾角调节电机电解板和倾角调节电机固定支架之间,所述倾角调节电机电解板的中部设有供倾角调节电机的输出轴穿过的过孔,所述第一销轴穿过第一弧形定位孔后与倾角调节电机电解板固定连接。倾角调节电机电解板对第一驱动齿轮起保护作用,还能增加第一驱动齿轮和倾角调节齿板啮合的稳定性。
16.上述方案中:所述高度调节齿板上设置有第二弧形定位孔,所述第二弧形定位孔与高度调节齿板同圆心,左侧的侧边板上设置有第二销轴插入到第二弧形定位孔中,高度调节齿板受驱转动时,第二销轴能沿第二弧形定位孔转动。第二弧形定位孔与第二销轴配合实现对高度调节齿板的翻转限位,防止高度调节齿板由于翻转过度与第二驱动齿轮分离。
17.上述方案中:所述第二销轴的自由端与左侧侧边板的内侧之间设有将第二驱动齿轮覆盖的高度调节电机电解板,所述高度调节电机电解板的中部设有供高度调节电机的输出轴穿过的过孔。高度调节电机电解板对第二驱动齿轮起保护作用,还能增加第二驱动齿轮和高度调节齿板啮合的稳定性。
18.本发明的有益效果是:
19.1、该座椅骨架的倾角和高度均可调节,两者配合能实现零重力调节,且倾角和高度调节的驱动装置占用空间小,能满足低坐姿的座椅布置,广泛适用于新能源汽车。
20.2、传统座椅的零重力调节装置在座框骨架下方占用空间大,不仅无法满足低坐姿的座椅布置,且座框骨架下方没有安全带卷收器的安装空间;本发明的零重力调节装置在座框骨架下方占用空间小,为安全带卷收器留出了足够的安装空间,通过卷收器固定支架将安全带卷收器定在两上滑轨之间,使其不受座椅骨架翻转的影响,避免了由于翻转角度过大,安全带卷收器无法正常工作、安全带卷收器自动锁止、安全带无法拉出的情况出现。
21.3、座框骨架的前端设有腿托,通过第一丝杆螺母机构和四连杆机构配合能实现腿托由收纳位置抬升至使用位置,通过第二丝杆螺母机构能实现腿托的延伸加长,以满足不同乘客的需求,有效缓解乘客长时间乘坐汽车时带来的腿部疲劳。
附图说明
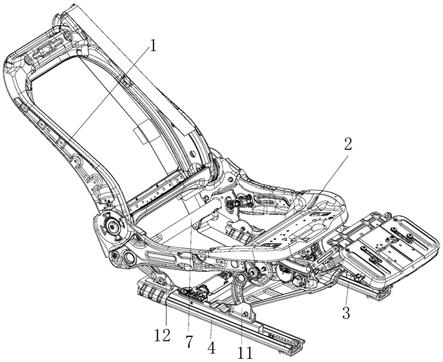
22.图1是本发明的整体结构示意图。
23.图2是座框支架的示意图。
24.图3是座框支架的另一个角度的示意图。
25.图4是第一齿板驱动装置的安装示意图。
26.图5是第一齿板驱动装置的分解示意图。
27.图6是腿托的结构示意图。
28.图7是图3中m处的放大视图。
29.图8是本发明的后视图。
30.图9是座框骨架调节到最低高度时的示意图。
31.图10是腿托收折时的示意图。
具体实施方式
32.如图1—10所示,一种低坐姿的多向调节零重力座椅骨架,主要由靠背骨架1、座框骨架2、左滑轨总成3和右滑轨总成4组成。座框骨架2包括两侧边板5、前横管6和后横管7,以及设在前横管6上的两坐盆支架8,左滑轨总成3的上滑轨上设有左滑轨前支架9和左滑轨后支架10,右滑轨总成4的上滑轨上设有右滑轨前支架11和右滑轨后支架12。
33.左一前连杆14的下端与左滑轨前支架9铰接,左一前连杆14的上端与左二前连杆13铰接,左二前连杆13的另一端与前横管6铰接。右前连杆15的下端与右滑轨前支架11铰接,右前连杆15的上端与前横管6之间设有第一齿板驱动装置a,第一齿板驱动装置a通过前横管6的运动调节座框骨架2的倾角。右后连杆16的下端与右滑轨后支架12铰接,右后连杆16的上端与后横管7固定连接,左滑轨后支架10与左侧的侧边板5之间设有第二齿板驱动装置b,第二齿板驱动装置b能通过后横管7的运动调节座框骨架2的高度。
34.座框骨架2的下方设有安全带卷收器17,安全带卷收器17具体可以设置在前横管6的下方,安全带卷收器17通过卷收器固定支架18固定在左右两侧的上滑轨上,座框骨架2和靠背骨架1上均设有安全带导向支架19,使安全带向后绕过后横管7,再向上延伸至靠背骨架1上。
35.座框骨架2的前端设有腿托,腿托包括两腿托支架20、下支撑板26和上支撑板27,两腿托支架20分别固定于两坐盆支架8上,腿托横杆21可转动地设置于两腿托支架20之间。腿托横杆21上左右相对设置有两四连杆机构c,四连杆机构c包括第一连杆22、第二连杆23、第三连杆24和第四连杆25,第一连杆22的上端与腿托横杆21固定连接,第一连杆22的下端与第二连杆23的上端铰接,第二连杆23的中部与第三连杆24的中部铰接,第二连杆23与下支撑板26铰接,第三连杆24的上端与对应侧的腿托支架20铰接,第三连杆24的下端与第四连杆25的上端铰接,第四连杆25的下端与下支撑板26铰接,且每个四连杆机构c与下支撑板26的两铰接点间隔设置。前横管6上设有第一丝杆螺母机构d,第一丝杆螺母机构d与从动杆28的下端铰接,从动杆28的上端与腿托横杆21固定连接,第一丝杆螺母机构d能带动从动杆28转动,从而带动腿托横杆21转动,进而带动四连杆机构c运动,四连杆机构c运动能带动下支撑板26抬升至使用位置或收折在收纳位置。下支撑板26上设有前后延伸的腿托滑轨29,上支撑板27滑动连接在腿托滑轨29上,下支撑板26与上支撑板27之间设有第二丝杆螺母机构e,第二丝杆螺母机构e能带动上支撑板27沿腿托滑轨29前后移动。
36.最好是,第一齿板驱动装置a包括倾角调节齿板30和倾角调节电机31,倾角调节电机31通过倾角调节电机固定支架32固定于前横管6上,前横管6焊接固定在两侧边板5之间。倾角调节电机31的输出轴上套装有第一驱动齿轮33,倾角调节齿板30为扇形板,倾角调节齿板30通过圆心孔铰接安装在前横管6上,右前连杆15的上端与倾角调节齿板30的另一端铰接,倾角调节齿板30的弧形齿朝前,第一驱动齿轮33与倾角调节齿板30啮合,左二前连杆13与倾角调节齿板30之间固定连接有倾角调节连接板52。由于增加了右前连杆15和倾角调节连接板52,座框骨架2的左右侧能同步旋转,同时又由于第一齿板驱动装置a与座椅骨架构成了多连杆机构,当倾角调节电机31驱动第一驱动齿轮33转动时,第一驱动齿轮33能带动倾角调节齿板30绕前横管6转动,倾角调节齿板30转动时能带动右前连杆15转动,倾角调节齿板30和右前连杆15同时转动能调节前横管6在高度上的位置,从而调节座框骨架2的倾角。第一齿板驱动装置a由简单的齿板和电机组成,占用空间小,在实现倾角调节的同时能满足低坐姿的座椅布置,且能为安全带卷收器17留出了足够的安装空间。
37.最好是,第二齿轮驱动装置b包括高度调节齿板34和高度调节电机35,高度调节齿板35为扇形板。高度调节齿板34通过圆心孔焊接固定在后横管7上,后横管7铰接安装在两侧边板5之间,高度调节齿板34的另一端与左滑轨后支架10铰接,高度调节齿板34的弧形齿朝前。高度调节电机35通过高度调节电机固定支架固定在左侧的侧边板5上,高度调节电机35的输出轴上套装有第二驱动齿轮36,第二驱动齿轮36与高度调节齿板34啮合。由于第二齿板驱动装置b与座椅骨架构成了多连杆机构,当高度调节电机35驱动第二驱动齿轮36转动时,第二驱动齿轮36能驱动高度调节齿板35带动后横管7相对侧边板5转动,高度调节齿板35受驱也会绕左滑轨后支架10转动,高度调节齿板35转动同时能调节后横管7在高度上的位置,从而调节座框骨架2的高度。第二齿板驱动装置b由简单的齿板和电机组成,占用空间小,在实现高度调节的同时能满足低坐姿的座椅布置。
38.最好是,第一丝杆螺母机构d由第一电动丝杆37和第一螺母38组成,第一螺母38固定在前横管6上,第一电动丝杆37的丝杆套装在第一螺母38中,从动杆28的下端铰接在第一电动丝杆37的电机上。当第一电动丝杆37的电机驱动丝杆转动时,第一电动丝杆37相对第一螺母38作直线运动,从而带动从动杆28转动,从动杆28转动能带动腿托横杆21转动。通过
第一丝杆螺母机构d与从动杆28联动,实现腿托横杆21转动,进而实现腿托的翻转,该结构设计巧妙,第一电动丝杆37能水平布设在座框骨架2的下方,在高度上占用空间小,有利于实现低坐姿的座椅布置。
39.最好是,第二丝杆螺母机构e由第二电动丝杆39和第二螺母40组成,第二电动丝杆39的丝杆的延伸方向与腿托滑轨29的延伸方向一致,第二螺母40套装在该丝杆上且与上支撑板27固定。当第二电动丝杆39的电机驱动丝杆转动时,第二螺母40能沿该丝杆的延伸方向移动,从而带动上支撑板27沿腿托滑轨29前后移动。通过简单的丝杆螺母机构实现上支撑板27相对下支撑板26的移动,从而实现腿托的延伸加长,以满足不同乘客的需求。
40.最好是,腿托滑轨29为塑料滑轨,塑料滑轨由带有蜂窝状镂空的塑料板制成,塑料滑轨上设有螺栓孔41,上支撑板27上设有前后延伸的导向孔42,连接螺栓43穿过导向孔42固定在螺栓孔41中将上支撑板27与塑料滑轨滑动连接在一起。连接螺栓43既与导向孔42配合为上支撑板27的移动起导向作用,又能防止上支撑板27与塑料滑轨分离。
41.最好是,倾角调节齿板30上设置有第一弧形定位孔44,第一弧形定位孔44与倾角调节齿板30同圆心,倾角调节电机固定支架32上设有插入到第一弧形定位孔44中的第一销轴45,倾角调节齿板30受驱转动时,第一销轴45能沿第一弧形定位孔44转动。第一弧形定位孔44与第一销轴45配合实现对倾角调节齿板30的翻转限位,防止倾角调节齿板30由于翻转过度与第一驱动齿轮33分离。
42.最好是,两侧边板5的内侧相对焊接有固定轴套46,前横管6的两端分别穿过两固定轴套46焊接在对应的侧边板5上,右侧的固定轴套46上焊接有倾角调节电机电解板47,倾角调节电机电解板47的另一端固定在倾角调节电机固定支架上32,第一驱动齿轮33与倾角调节齿板30啮合在倾角调节电机电解板47和倾角调节电机固定支架32之间,倾角调节电机电解板47的中部设有供倾角调节电机31的输出轴穿过的过孔,第一销轴45穿过第一弧形定位孔44后与倾角调节电机电解板47固定连接。倾角调节电机电解板47对第一驱动齿轮33起保护作用,还能增加第一驱动齿轮33和倾角调节齿板30啮合的稳定性。
43.最好是,高度调节齿板34上设置有第二弧形定位孔49,第二弧形定位孔49与高度调节齿板34同圆心,左侧的侧边板5上设置有第二销轴50插入到第二弧形定位孔49中,高度调节齿板34受驱转动时,第二销轴50能沿第二弧形定位孔49转动。第二弧形定位孔49与第二销轴50配合实现对高度调节齿板34的翻转限位,防止高度调节齿板34由于翻转过度与第二驱动齿轮36分离。
44.最好是,第二销轴50的自由端与左侧侧边板5的内侧之间设有将第二驱动齿轮36覆盖的高度调节电机电解板48,高度调节电机电解板48的中部设有供高度调节电机35的输出轴穿过的过孔。高度调节电机电解板48对第二驱动齿轮36起保护作用,还能增加第二驱动齿轮36和高度调节齿板34啮合的稳定性。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 无人驾驶车辆控制系统的制作方...
- 一种交叉口黄灯期间车辆驾驶辅...
- 一种底盘电器盒的制作方法
- 一种制动能量回馈优化方法、装...
- 搬运车预警系统和搬运车预警方...
- 一种三合一混合能源供电的轨道...
- 电动汽车采暖控制方法、装置、...
- 一种基于超级电容储能的纯电动...
- 车辆停车后的驻车控制方法、整...
- 一种具有防尘散热装置的新能源...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1