一种基于视觉手势控制的工业操作机械臂结构及其方法与流程
1.本发明涉及工业机器人技术领域,特别涉及一种基于视觉手势控制的工业操作机械臂结构及其方法。
背景技术:
2.工业机器人是广泛用于工业领域的多关节机械手或多自由度的机器装置,具有一定的自动性,可依靠自身的动力能源和控制能力实现各种工业加工制造功能。工业机器人被广泛应用于电子、物流、化工等各个工业领域之中,工业机器人在工业上常常使用机械臂结构。
3.基于视觉的手势交互使用手势识别方法实现人机交互,从交互过程来看,主要包含4个步骤,如图2所示:1)数据采集:通过摄像头采集人体手部图像;2)手部检测与分割:检测输入图像是否有手,如果有手,则检测出手的具体位置,并将手部分割出来;3)手势识别:提取手部区域特征并将其种类按照一定方法识别出来;4)使用识别结果控制虚拟环境中的人或物:将识别结果发送给虚拟环境控制系统,从而控制虚拟人/物实现特定运动。其中,手势识别是整个手势交互过程的核心,而手部检测与分割则是手势识别的基础。
4.现有的手势控制机械臂,而现有的机械臂配件单一,往往一个配件只能实现一个功能,例如夹持只有夹臂夹持或者吸盘夹持两个独立的配件,针对不同的物品而需要更换,导致效率降低。
技术实现要素:
5.本发明的目的在于提供一种基于视觉手势控制的工业操作机械臂结构及其方法,以解决上述背景技术中提出的问题。
6.为实现上述目的,本发明提供如下技术方案:一种基于视觉手势控制的工业操作机械臂结构,包括底座以及设置在底座上的机械臂组件,并在机械臂组件的前端连接有配件的更换接口,机械臂组件通过配件的更换接口连接有集成底座,集成底座上设置有夹持吸盘组件和手势识别器,夹持吸盘组件用于夹臂夹持或者通过吸盘负压夹持。
7.进一步地,机械臂组件包括轴减速电机、轴臂和底座电机,其中,底座电机安装在底座固定;
8.所述轴减速电机和轴臂为一组,设置不小于一组的轴减速电机和轴臂相互连接形成多轴机械臂,其中,多轴机械臂的一端与底座电机相接,另一端与更换接口相接,并且底座电机和轴减速电机均受控于手势识别器,通过手势识别器识别手势控制机械臂组件和夹持吸盘组件,根据不同手势下达的不同指令,驱动夹持吸盘组件用于夹臂夹持或者吸盘夹持动作。
9.进一步地,更换接口包括接头座、插杆和插头,其中,接头座上固定有插槽,插杆径向贯穿接头座延伸至插槽内;
10.所述插头的一端插入插槽内,并且插头的侧面设有贯穿的螺孔,插杆与插头的螺
孔啮合,插头的另一端与集成底座固定。
11.进一步地,夹持吸盘组件包括夹臂夹持组件、吸盘夹持组件和动力组件,夹臂夹持组件和吸盘夹持组件均设置在集成底座上,并且之间相互连接,动力组件与吸盘夹持组件相接。
12.进一步地,夹臂夹持组件包括左丝杠、右丝杆、第一锥齿轮、左夹臂和右夹臂,左丝杠和右丝杆分别置于集成底座底部对称的两个空槽内,并且左丝杠和右丝杆的一端均插入集成底座中部的传动腔室内与第一锥齿轮相接,左夹臂与左丝杠啮合,右夹臂与右丝杆啮合,左夹臂和右夹臂穿出集成底座。
13.进一步地,吸盘夹持组件包括负压气泵、支撑管、负压管、真空吸盘、吸盘管、上弹簧、下弹簧和传动螺杆,支撑管与集成底座固定,支撑管的内部设有直径不同的两个空腔,其中直径大的空腔上下端均固定有上弹簧和下弹簧,直径小的空间贯穿支撑管并与传动腔室和大空腔连通;
14.所述吸盘管的一端插入大空腔内,另一端穿出支撑管与真空吸盘相接,位于大空腔的吸盘管上连接有扩口环,其中扩口环与大空腔的内壁密封连接,扩口环侧边沿的缺口还被大空腔内壁上的条形块贯穿,支撑管径向设置的通孔与大空腔连通,用于平衡气压;
15.所述传动螺杆一端连接有第二锥齿轮,传动螺杆的另一端插入吸盘管内,其中,吸盘管的内壁设有一段内螺纹,吸盘管的侧面还设有气流通孔,吸盘管下降至最大行程则气流通孔与负压管连通,并且负压管与集成底座上的负压气泵连接;
16.所述扩口环位于上弹簧和下弹簧之间。
17.进一步地,动力组件包括双级减速电机和传动轴,双级减速电机设置在集成底座内,双级减速电机上连接的传动轴穿入传动腔室与第二锥齿轮的端口固定,其中第二锥齿轮的两侧分别与左丝杠和右丝杆的第一锥齿轮啮合,则通过双级减速电机驱动左丝杠和右丝杆反向旋转,左夹臂和右夹臂同向或者反向移动。
18.进一步地,手势识别器包括立体摄像头、动作提取模块、图像处理模块和机械臂控制模块,立体摄像头与图像处理模块相接,图像处理模块与动作提取模块相接,动作提取模块接入机械臂控制模块,通过立体摄像头采集手势动作并以模拟数据发送至图像处理模块,图像处理模块通过模数转换将立体摄像头拍摄的手势动作处理为一帧一帧的图片,动作提取模块提取每一帧内的手势动作,并将手势动作发送至机械臂控制模块,通过对手势动作的识别与存储的手势数据库对比识别手势指令,并下达指令机械臂组件和夹持吸盘组件,控制机械臂。
19.本发明提出的另一种技术,包括基于视觉手势控制的工业操作机械臂结构的方法,包括以下步骤:
20.s1:立体摄像头采集手势动作后通过逐帧转换为图片,并识别图片中的手势,下达指令至机械臂组件和夹持吸盘组件,控制底座电机和轴减速电机调整机械臂的位置,控制双级减速电机选择夹持方式;
21.s2:若识别的指令为夹臂夹持,则驱动双级减速电机的传动轴正转,则在下弹簧的推力下,传动螺杆的旋转方向与吸盘管的内螺纹方向相反,吸盘管带动真空吸盘上移,吸盘管的扩口环抵在上弹簧上带动上弹簧压缩,直至吸盘管和吸盘管的螺纹脱离,真空吸盘完全缩入支撑管内;
22.在传动螺杆旋转的同时,左丝杠和右丝杆也同步旋转,并且左夹臂和右夹臂相向移动夹持物体;
23.s3:若识别的指令为吸盘负压夹持,则驱动双级减速电机的传动轴反转,则在上弹簧的推力下,传动螺杆的旋转方向与吸盘管的内螺纹方向相反,吸盘管带动真空吸盘下移,吸盘管的扩口环抵在下弹簧上带动下弹簧压缩,直至吸盘管和吸盘管的螺纹脱离,真空吸盘完全伸出支撑管内,吸盘管下降至最大行程则气流通孔与负压管连通,并且负压管与集成底座上的负压气泵连接,真空吸盘内有负压气流,用于真空吸住待夹物;
24.在传动螺杆旋转的同时,左丝杠和右丝杆也同步旋转,并且左夹臂和右夹臂相反移动。
25.与现有技术相比,本发明的有益效果是:
26.本发明提出的一种基于视觉手势控制的工业操作机械臂结构及其方法,立体摄像头采集手势动作后通过逐帧转换为图片,并识别图片中的手势,下达指令至机械臂组件和夹持吸盘组件,控制底座电机和轴减速电机调整机械臂的位置,控制双级减速电机选择夹持方式;若识别的指令为夹臂夹持,则驱动双级减速电机的传动轴正转,则在下弹簧的推力下,传动螺杆的旋转方向与吸盘管的内螺纹方向相反,吸盘管带动真空吸盘上移,吸盘管的扩口环抵在上弹簧上带动上弹簧压缩,直至吸盘管和吸盘管的螺纹脱离,真空吸盘完全缩入支撑管内;
27.在传动螺杆旋转的同时,左丝杠和右丝杆也同步旋转,并且左夹臂和右夹臂相向移动夹持物体;
28.若识别的指令为吸盘负压夹持,则驱动双级减速电机的传动轴反转,则在上弹簧的推力下,传动螺杆的旋转方向与吸盘管的内螺纹方向相反,吸盘管带动真空吸盘下移,吸盘管的扩口环抵在下弹簧上带动下弹簧压缩,直至吸盘管和吸盘管的螺纹脱离,真空吸盘完全伸出支撑管内,吸盘管下降至最大行程则气流通孔与负压管连通,并且负压管与集成底座上的负压气泵连接,真空吸盘内有负压气流,用于真空吸住待夹物;
29.在传动螺杆旋转的同时,左丝杠和右丝杆也同步旋转,并且左夹臂和右夹臂相反移动。
30.将夹臂夹持和吸盘夹持两者结合在一起,采用单一动力控制,针对不同需求可以选择不同的夹持方式,可以有选择的针对不同工件或者不同形状的结构,调整至最合适的夹持方式。
附图说明
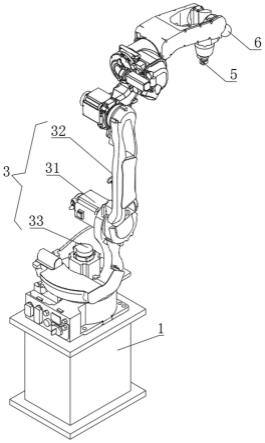
31.图1为本发明的整体立体图;
32.图2为本发明的更换接口结构图;
33.图3为本发明的实施例一的夹持吸盘组件状态图一;
34.图4为本发明的实施例一的夹持吸盘组件状态图二;
35.图5为本发明的实施例二的夹持吸盘组件状态图一;
36.图6为本发明的实施例二的夹持吸盘组件状态图二;
37.图7为本发明的图3的a处放大图;
38.图8为本发明的图4的b处放大图。
39.图中:1、底座;2、更换接口;21、接头座;211、插槽;22、插杆;23、插头;3、机械臂组件;31、轴减速电机;32、轴臂;33、底座电机;4、集成底座;5、夹持吸盘组件;51、夹臂夹持组件;511、左丝杠;512、右丝杆;513、第一锥齿轮;514、左夹臂;515、右夹臂;52、吸盘夹持组件;521、负压气泵;523、支撑管;524、负压管;525、真空吸盘;526、吸盘管;527、上弹簧;528、下弹簧;529、传动螺杆;53、动力组件;531、双级减速电机;532、传动轴;6、手势识别器。
具体实施方式
40.下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述,显然,所描述的实施例仅仅是本发明一部分实施例,而不是全部的实施例。基于本发明中的实施例,本领域普通技术人员在没有做出创造性劳动前提下所获得的所有其他实施例,都属于本发明保护的范围。
41.实施例一:
42.请参阅图1,一种基于视觉手势控制的工业操作机械臂结构,包括底座1以及设置在底座1上的机械臂组件3,并在机械臂组件3的前端连接有配件的更换接口2,机械臂组件3通过配件的更换接口2连接有集成底座4,集成底座4上设置有夹持吸盘组件5和手势识别器6,夹持吸盘组件5用于夹臂夹持或者通过吸盘负压夹持。
43.在本实施例中通过手势识别器6识别下达的手势指令,其中手势指令包括手势握拳、五指张开以及手指并拢并掌心朝向手势识别器6的动作,通过不同的动作下达不同的指令;
44.机械臂组件3包括轴减速电机31、轴臂32和底座电机33,其中,底座电机33安装在底座1固定,底座电机33被底座1固定;
45.轴减速电机31和轴臂32为一组,设置不小于一组的轴减速电机31和轴臂32相互连接形成多轴机械臂,其中,多轴机械臂的一端与底座电机33相接,另一端与更换接口2相接,并且底座电机33和轴减速电机31均受控于手势识别器6,通过手势识别器6识别手势控制机械臂组件3和夹持吸盘组件5,根据不同手势下达的不同指令,驱动夹持吸盘组件5用于夹臂夹持或者吸盘夹持动作,从而基于视觉手势控制机械臂的不同动作。
46.请参阅图2,更换接口2包括接头座21、插杆22和插头23,其中,接头座21上固定有插槽211,插杆22径向贯穿接头座21延伸至插槽211内;
47.插头23的一端插入插槽211内,并且插头23的侧面设有贯穿的螺孔,插杆22与插头23的螺孔啮合,插头23的另一端与集成底座4固定,通过设置的插接方式,让集成底座4和机械臂之间能够根据不同的需求进行更换,插接的方式更换快速;
48.请参阅图3-4,夹持吸盘组件5包括夹臂夹持组件51、吸盘夹持组件52和动力组件53,夹臂夹持组件51和吸盘夹持组件52均设置在集成底座4上,并且之间相互连接,动力组件53与吸盘夹持组件52相接。
49.请参阅图7,夹臂夹持组件51包括左丝杠511、右丝杆512、第一锥齿轮513、左夹臂514和右夹臂515,左丝杠511和右丝杆512分别置于集成底座4底部对称的两个空槽内,并且左丝杠511和右丝杆512的一端均插入集成底座4中部的传动腔室内与第一锥齿轮513相接,左夹臂514与左丝杠511啮合,右夹臂515与右丝杆512啮合,左夹臂514和右夹臂515穿出集成底座4,在左夹臂514与左丝杠511旋转时,左夹臂514和右夹臂515也跟随着同步旋转,从
而实现相向或者相反的动作。
50.请参阅图8,吸盘夹持组件52包括负压气泵521、支撑管523、负压管524、真空吸盘525、吸盘管526、上弹簧527、下弹簧528和传动螺杆529,支撑管523与集成底座4固定,支撑管523的内部设有直径不同的两个空腔,其中直径大的空腔上下端均固定有上弹簧527和下弹簧528,直径小的空间贯穿支撑管523并与传动腔室和大空腔连通;
51.吸盘管526的一端插入大空腔内,另一端穿出支撑管523与真空吸盘525相接,位于大空腔的吸盘管526上连接有扩口环,其中扩口环与大空腔的内壁密封连接,扩口环侧边沿的缺口还被大空腔内壁上的条形块贯穿,支撑管523径向设置的通孔与大空腔连通,用于平衡气压,避免在扩口环在大空腔移动的过程中,造成局部压强增大而影响运动;
52.传动螺杆529一端连接有第二锥齿轮,传动螺杆529的另一端插入吸盘管526内,其中,吸盘管526的内壁设有一段内螺纹,吸盘管526的侧面还设有气流通孔,吸盘管526下降至最大行程则气流通孔与负压管524连通,并且负压管524与集成底座4上的负压气泵521连接;
53.扩口环位于上弹簧527和下弹簧528之间。
54.动力组件53包括双级减速电机531和传动轴532,双级减速电机531设置在集成底座4内,双级减速电机531上连接的传动轴532穿入传动腔室与第二锥齿轮的端口固定,其中第二锥齿轮的两侧分别与左丝杠511和右丝杆512的第一锥齿轮513啮合,则通过双级减速电机531驱动左丝杠511和右丝杆512反向旋转,左夹臂514和右夹臂515同向或者反向移动。
55.手势识别器6包括立体摄像头、动作提取模块、图像处理模块和机械臂控制模块,立体摄像头与图像处理模块相接,图像处理模块与动作提取模块相接,动作提取模块接入机械臂控制模块,通过立体摄像头采集手势动作并以模拟数据发送至图像处理模块,图像处理模块通过模数转换将立体摄像头拍摄的手势动作处理为一帧一帧的图片,动作提取模块提取每一帧内的手势动作,并将手势动作发送至机械臂控制模块,通过对手势动作的识别与存储的手势数据库对比识别手势指令,并下达指令机械臂组件3和夹持吸盘组件5,控制机械臂。
[0056][0057][0058]
一种基于视觉手势控制的工业操作机械臂结构的方法,包括以下步骤:
[0059]
步骤一:立体摄像头采集手势动作后通过逐帧转换为图片,并识别图片中的手势,
下达指令至机械臂组件3和夹持吸盘组件5,控制底座电机33和轴减速电机31调整机械臂的位置,控制双级减速电机531选择夹持方式;
[0060]
步骤二:若识别的指令为夹臂夹持,则驱动双级减速电机531的传动轴532正转,则在下弹簧528的推力下,传动螺杆529的旋转方向与吸盘管526的内螺纹方向相反,吸盘管526带动真空吸盘525上移,吸盘管526的扩口环抵在上弹簧527上带动上弹簧527压缩,直至吸盘管526和吸盘管526的螺纹脱离,真空吸盘525完全缩入支撑管523内;
[0061]
在传动螺杆529旋转的同时,左丝杠511和右丝杆512也同步旋转,并且左夹臂514和右夹臂515相向移动夹持物体;
[0062]
步骤三:若识别的指令为吸盘负压夹持,则驱动双级减速电机531的传动轴532反转,则在上弹簧527的推力下,传动螺杆529的旋转方向与吸盘管526的内螺纹方向相反,吸盘管526带动真空吸盘525下移,吸盘管526的扩口环抵在下弹簧528上带动下弹簧528压缩,直至吸盘管526和吸盘管526的螺纹脱离,真空吸盘525完全伸出支撑管523内,吸盘管526下降至最大行程则气流通孔与负压管524连通,并且负压管524与集成底座4上的负压气泵521连接,真空吸盘525内有负压气流,用于真空吸住待夹物;
[0063]
在传动螺杆529旋转的同时,左丝杠511和右丝杆512也同步旋转,并且左夹臂514和右夹臂515相反移动。
[0064]
将夹臂夹持和吸盘夹持两者结合在一起,采用单一动力控制,针对不同需求可以选择不同的夹持方式,可以有选择的针对不同工件或者不同形状的结构,调整至最合适的夹持方式。
[0065]
实施例二:
[0066]
本实施例与实施例一的不同处在于更换接口2,本实施的接口通过采用螺纹装配的方式,或者采用过盈连接的方式,并通过径向设置的横杆贯穿其连接部,从而让其接口的装配方式更加多变,从而能够在不同的条件下使用不同的接口。
[0067]
实施例三:
[0068]
请参阅图5-6,本实施例与实施例一的不同处在于夹臂夹持组件51上也设置有负压组件,本实施例的负压气泵521还分别与左夹臂514和右夹臂515夹持面的负压孔连通,则在左夹臂514和右夹臂515夹持时,并且负压孔内设有调节通断的阀门,通过控制阀门实现负压孔的通断,在吸盘工作时,负压孔被隔断,在夹臂工作时,负压孔导通从而提高夹持的稳定性。
[0069]
综上所述;本发明的基于视觉手势控制的工业操作机械臂结构及其方法,包括底座1以及设置在底座1上的机械臂组件3,并在机械臂组件3的前端连接有配件的更换接口2,机械臂组件3通过配件的更换接口2连接有集成底座4,集成底座4上设置有夹持吸盘组件5和手势识别器6,夹持吸盘组件5用于夹臂夹持或者通过吸盘负压夹持。通过手势识别器6识别下达的手势指令,其中手势指令包括手势握拳、五指张开以及手指并拢并掌心朝向手势识别器6的动作,通过不同的动作下达不同的指令;驱动夹持吸盘组件5用于夹臂夹持或者吸盘夹持动作,从而基于视觉手势控制机械臂的不同动作。
[0070]
以上所述,仅为本发明较佳的具体实施方式,但本发明的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本发明披露的技术范围内,根据本发明的技术方案及其发明构思加以等同替换或改变,都应涵盖在本发明的保护范围之内。
完整全部详细技术资料下载
当前第1页 1 2
相关技术
- 一种色母粒高效切割装置
- 单平面钢丝式室内巡视机器人及...
- 一种多功能液压当归切片机的制...
- 铰链组件及具有其的制冷设备的...
- 一种便捷的使锚杆锚固端粘贴小...
- 一种煤矿巡检机器人的控制系统...
- 一种生产台灯用自动化装配机器...
- 一种人工智能餐饮机器人的制作...
- 一种基于多帧伪标签数据增强的...
- 一种可调夹持力的机械手的制作...
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1